AI 驅動文件
您想了解什麼?
建立首個程式
本深度指南將解釋什麼是程式,概述分類(Classification)與分割(Segmentation)之間的區別,並提供建立程式的逐步指導。同時還包括影象設定配置、模板影象捕獲與對齊設定、ROI 最佳化、資料採集與 AI 訓練以及影象資料增強配置的詳細說明。
檢視本主題的實際操作:如何在幾分鐘內建立分割程式
學習目標
完成本深度指南後,您將瞭解:
- 什麼是程式
- 分類與分割之間的區別——以及何時使用每種方法
- 如何建立程式
- 如何配置影象設定
- 如何捕獲模板影象並配置對齊器
- 什麼是 ROI(感興趣區域)以及如何最佳化它們
- 用於 AI 訓練的資料採集
- 程式測試與驗證
什麼是程式?
- 一組配置好的指令,用於告知攝像頭如何檢測特定的零件或產品。
- 定義攝像頭設定,包括曝光、對焦和照明引數,以實現一致的影象捕獲。
- 包含處理邏輯,例如 ROI 定義、對齊器、分類或分割類別。
- 儲存輸入/輸出配置,以與自動化系統整合,實現透過/失敗或高階訊號。
- 可被儲存和重複使用,以確保跨班次、生產線或工廠的檢測一致性。
分類 vs. 分割
定義
- 分類(Classification):識別 ROI 中物體的型別
- 分割(Segmentation):定位並分析影象/ROI 中的區域
示例
| 影象分類 | 影象分割 | 影象分類 | 影象分割 |
|---|---|---|---|
| 什麼是綿羊? | 哪些畫素屬於哪個物體? | 這個披薩是合格還是有缺陷? | 每片義大利香腸在哪裡? |
 |  |  |  |
關鍵對比
| 分類 | 分割 | |
|---|---|---|
| 速度 | 速度取決於影象設定和複雜度。在簡單設定下通常高效快速 | 經過最佳化後可以與分類一樣快甚至更快,尤其是在使用簡化模型時 |
| 準確性 | 適合整體的透過/失敗或零件型別識別 | 對精確缺陷定位具有更高的準確性 |
| 複雜度 | 簡單,易於設定和維護;引數較少 | 複雜——需要更多資料、標註和調優 |
| 資料需求 | 低——所需的標註影象較少 | 中等——需要大量帶有畫素級精細標註的影象 |
| 使用場景 | 零件存在性、方向、基本質量檢查、零件已插入/未插入等。 | 表面缺陷、精細特徵檢測、多缺陷檢測、計數、測量等。 |
建立和匯出程式
使用程式旁邊的匯出程式按鈕可匯出單個程式。
![]()
使用螢幕頂部的匯出按鈕可一次匯出多個程式。

使用螢幕頂部的匯入按鈕可匯入程式。

請注意: 每個程式一次僅支援一種檢測型別,即分割或分類。在開始設定之前,請選擇正確的型別。
影象設定
對焦

- 含義: 調整捕獲影象的清晰度。
- 使用方法: 滑動直至影象中的邊緣和細節看起來清晰銳利。
對焦時請使用具有清晰邊緣的目標物體(如直尺或校準卡)。
影象旋轉

- 含義: 旋轉影象(0° 或 180°)。
- 使用場景: 如果相機以某個角度安裝,但您希望在介面中以另一個方向顯示影象。
如果需要將影象旋轉 90°,請旋轉相機。
曝光 (ms)

- 含義: 影象捕獲期間感測器暴露在光線下的時長。
- 效果:
- 較高曝光 → 影象更亮,但有運動模糊的風險。
- 較低曝光 → 光線較少,但在快速運動應用中影象更清晰。
| 曝光不足 | 曝光正確 | 曝光過度 |
|---|---|---|
 |  |  |
曝光呈對數關係,且曝光越高意味著延遲越大(因為影象捕獲需要更多時間)。
增益

- 含義: 透過數字方式人為提亮影象(類似相機上的 ISO)。
- 效果:
- 較高增益 → 影象更亮,但會增加噪點(顆粒感)。
- 較低增益 → 影象更乾淨,但需要良好的照明。
| 高增益 | 低增益 |
|---|---|
 |  |
| 更亮但噪點更多 | 更暗但噪點更少 |
僅在無法調整曝光或照明時才增加增益。
自動白平衡

- 含義: 自動調整顏色平衡,使白色呈現為白色。
- 使用場景:
- 適用於照明條件多變或不穩定的環境。
- 對於穩定的設定,手動白平衡可提供更一致且可重複的結果。
手動調整白平衡的方法:
- 將自動白平衡開關切換至開。
- 在相機下方或鏡頭前放置一張白紙。
- 將開關切換至關以鎖定白平衡設定。
Gamma

- 含義: 調整中間色調的亮度,對暗部或亮部區域影響較小。
- 效果: 有助於顯現陰影中的細節或抑制過亮的高光。
Lens Correction

- 含義: 校正廣角鏡頭產生的畸變。
- 何時啟用: 如果影象邊緣出現彎曲或畸變,請開啟此選項以提高對齊任務的精度。
LED Strobe Mode

- 含義: 控制相機內建 LED 燈的觸發時機。
- 選項:
- Off:LED 持續常亮。
- On:LED 僅在捕獲影象時閃爍,可減少反光。
LED Light Pattern

- 含義: 選擇 LED 的點亮方式(例如,全部點亮、全部關閉、左右、上下等)。
- 用例: 根據您的照明設定進行調整,以獲得最佳的零件照明效果。
使用方向性照明模式可減少眩光或反光,方法是關閉直射反光表面的 LED,同時保持斜向光源開啟,以獲得更好的可見度。
LED Light Intensity

- 含義: 調整 LED 照明的亮度。
- 最佳實踐: 從低亮度開始逐步增加,以避免眩光或反光。
Photometric Control

- 含義: 在不同方向的照明(左、右、上、下)下捕獲多張影象(通常為四張),然後將它們合成為一張增強後的影象。
- 目的: 此技術透過提供均勻、一致的照明,減少陰影並突出細微的表面特徵。
- 何時使用: 適用於複雜零件、高反光表面或表面紋理不均勻的零件,這些情況下標準單光源影象可能會遺漏關鍵細節。
Trigger Settings

Manual Trigger
- 含義: 當您按下 HMI 螢幕上的按鈕時捕獲影象。
- 最適用於: 測試、設定或手動檢測。
Hardware Trigger
- 含義: 使用電訊號(例如來自感測器)來觸發相機。
- 最適用於: 由感測器檢測零件到位的自動化生產線。
PLC Trigger
- 含義: 透過工業控制器 (PLC) 傳送觸發訊號,以與其他機器同步工作。
- 最適用於: 需要精確時序的全自動化系統。
Aligner Trigger
- 含義: 當系統檢測到視野範圍內的零件對齊時自動觸發。
- 最適用於: 需要在捕獲前保持一致定位的應用,或沒有其他可靠觸發源的場景。
Interval Trigger
- 含義: 按設定的時間間隔觸發相機。
- 最適用於: 連續生產流程或在無零件檢測感測器的情況下監控移動生產線。
模板影象與對齊
跳過對齊器

- 功能說明: 在檢測過程中關閉對齊步驟。
- 使用場景: 當零件在影象中始終處於相同位置和方向時使用。
模板區域

- 功能說明: 定義用於對齊的模板影象區域。
- 矩形: 繪製矩形感興趣區域。
- 圓形: 繪製圓形感興趣區域。
- 忽略模板區域: 將某些區域排除在對齊之外,以避免干擾圖案或不相關特徵。
- 最佳用途: 幫助系統僅關注最具辨識度的零件特徵,以實現精確對齊。
旋轉範圍

- 功能說明: 設定系統在將零件與模板進行匹配時可容忍的旋轉角度(以度為單位)。
- 示例: 設定 ±20° 可允許零件略微旋轉但仍能被檢測到。
- 調整時機: 如果零件在生產過程中容易發生旋轉,則增大此值;對於方向高度一致的零件,則減小此值。
靈敏度

- 功能說明: 控制系統在實時影象與模板之間尋找匹配的精細程度。
- 效果:
- 高靈敏度 → 可檢測出更細微的細節,適用於複雜零件。
- 低靈敏度 → 減少誤匹配,但可能會忽略細微特徵。
置信度閾值

- 功能說明: 設定系統接受檢測結果所需的最低置信度分數。
- 效果:
- 閾值較高 → 誤報較少,但可能錯過邊緣匹配。
- 閾值較低 → 檢測結果增多,但誤報風險增加。
建議從中等值開始,並根據測試結果進行調整。
尺度不變

- 功能說明: 允許系統檢測尺寸略大於或略小於原始模板影象的零件。
- 啟用時機: 當零件尺寸因定位、距離變化或製造公差而可能略有變化時啟用。
實時預覽圖例
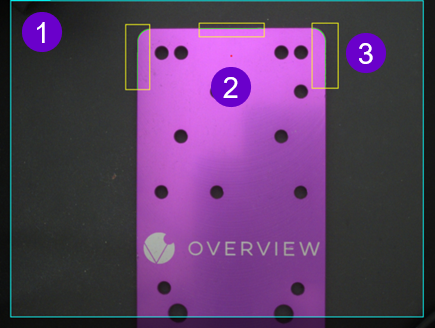
1. 一個可配置的邊界框,用於定義觸發期間要監控的相機視場 FOV 的特定區域。
- 用途: 確保相機僅關注相關區域,忽略不必要的背景區域。
- 最佳用途:
- 對於移動物體,確保零件完全保持在檢測區域內。
- 透過減少分析的影象資料量,最佳化處理速度。
2. 一個紅色可視圓點,顯示影象中所有已定義 ROI(感興趣區域)的中心點。
- 用途: 幫助您相對於零件或相機檢視對齊和定位搜尋區域。
3. 綠線表示已檢測到物體邊緣。
如果您看到該線變為紅色,請嘗試增大 ROI 尺寸、調整 ROI 或提高靈敏度。

ROI (感興趣區域) 定義與最佳化
檢測型別

- 定義: 定義所執行的檢測型別,並將類似的 ROI(感興趣區域)分組。
- 示例: "Holes",用於檢查零件上孔的存在、大小或質量。
- 主要功能:
- 新增檢測型別: 為不同的檢測需求建立新類別。
- ROI 數量: 顯示當前分配給該檢測型別的 ROI 數量。
變換
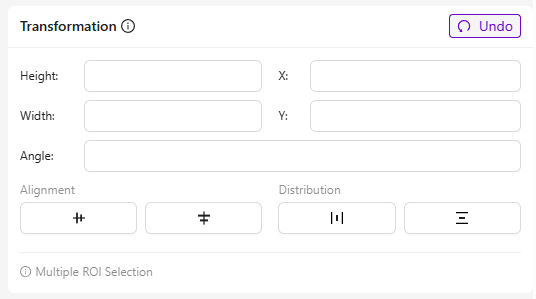
- 定義: 調整所選 ROI 的位置和幾何形狀,以實現精準的對齊與放置。
- 欄位及其用途:
- 高度/寬度: 更改 ROI 的尺寸。
- X / Y: 沿水平(X)和垂直(Y)軸移動 ROI 的位置。
- 角度: 圍繞 ROI 中心進行旋轉。
- 最佳用途: 當存在重複圖案(如多個相同的孔)時,可加快設定速度。
感興趣區域 (ROI)
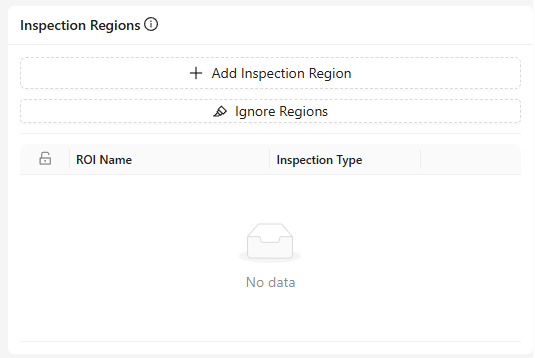
- 定義: 模板影象中定義的所有 ROI 的列表。
- 功能:
- 新增感興趣區域 (ROI): 手動建立新的 ROI。
- 忽略區域: 從處理流程中排除特定區域。
- 編輯: 儲存、刪除或取消。
- 鎖定圖示: 表示已鎖定的 ROI,未解鎖前無法移動。
實時預覽模式
![]()
- 定義: 在調整或新增 ROI 後顯示實時反饋。
- 使用場景: 非常適合在設定過程中微調 ROI 的位置和大小。
測試按鈕
![]()
- 定義: 基於舊影象執行回測以驗證更改。
- 使用場景: 比較當前結果與先前設定,以確保準確性和一致性。
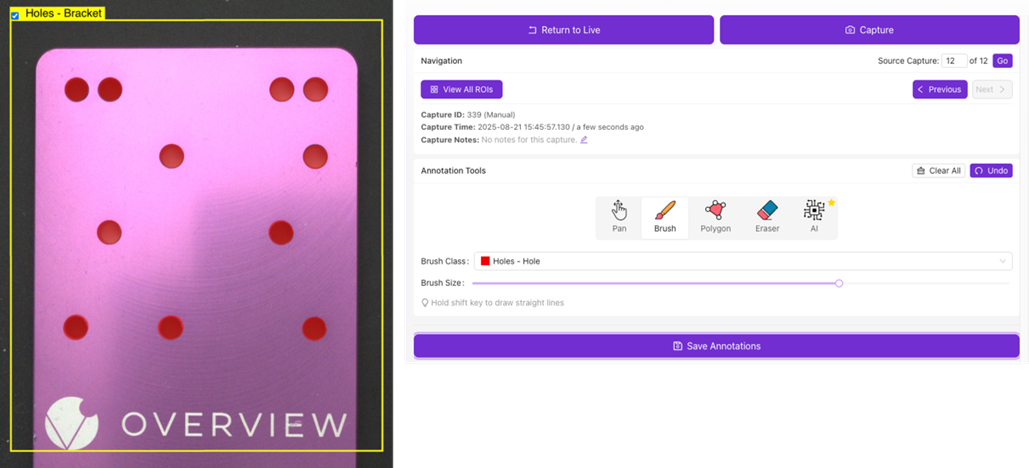
資料收集與 AI 訓練
定義不同的檢測類別,並根據指定的檢測型別為每個 ROI 新增標籤(參見下方示例)。
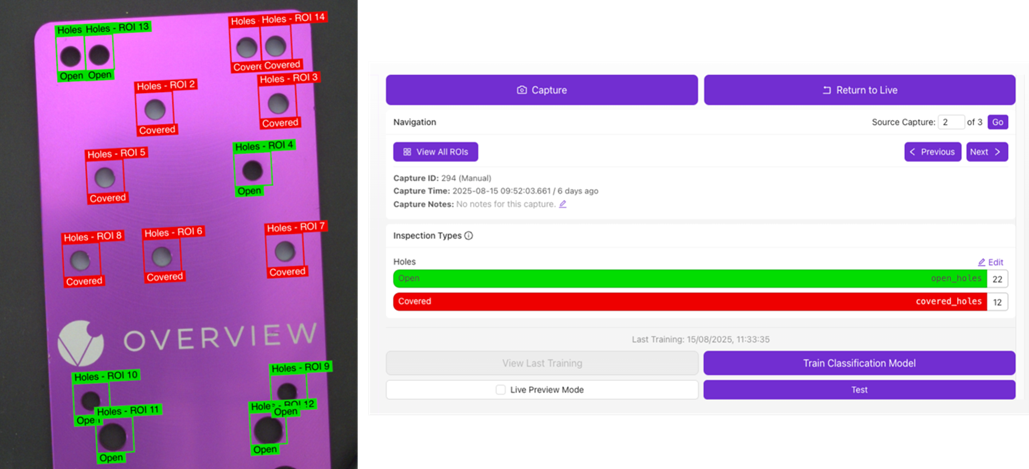
使用標註工具對影象進行標記/標註。使用畫筆類別下拉選單選擇要標註的類別。目前每個程式最多支援 10 個分割類別。
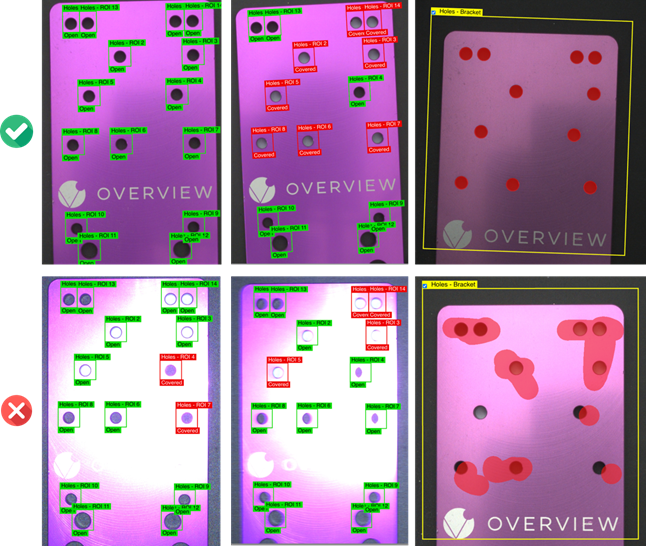
優質資料的重要性
-
垃圾進,垃圾出: AI 模型的效能取決於輸入資料的質量。低質量或不一致的資料會導致不準確的結果。
-
多樣性至關重要: 收集能代表所有真實世界變化的資料:不同班次、光照條件、零件位置和表面狀況。
-
質量優於數量: 小而乾淨、標註良好的資料集往往比龐大但嘈雜或不一致的資料集表現更好。
標註基礎:
- 分類: 將整個影象或 ROI 標記為特定類別(例如 "Good"、"Damaged")。
- 分割: 以畫素級精度塗刷、勾勒或高亮特定的關注區域(例如表面上的劃痕位置)。
- 一致性: 使用一致的規則和定義進行標註,以避免訓練過程中的混淆。

常見陷阱
- 資料不足: 樣本過少會導致欠擬合,從而在實際應用中表現不佳。
- 類別不平衡: 某一類別樣本過多(例如大量 "good" 零件但缺陷件很少)會使模型產生偏差。
- 標註質量差: 錯誤、不一致或倉促的標註會導致準確率顯著下降。
- 忽視環境變化: 當光照、零件方向或表面狀況發生變化時未更新資料集,會導致準確率漂移。
- 未驗證資料: 訓練前跳過質量檢查通常會導致時間浪費和返工。
資料增強
影象資料增強人為修改訓練影象,以提高模型的魯棒性。它們模擬真實世界中的變化,例如亮度偏移、旋轉或噪聲,使模型在不同條件下都能良好執行。
顏色增強
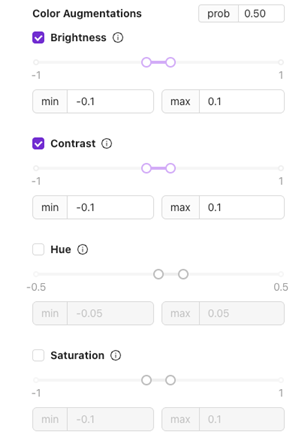
亮度 (Brightness)
- 定義: 調整影象的明暗程度。
- 使用場景: 用於應對生產過程中光照的輕微變化。
在穩定的環境中使用 ±0.1;如果光照變化較大,可適當增加。
對比度 (Contrast)
- 定義: 改變明暗區域之間的差異。
- 使用場景: 適用於具有紋理或表面變化的部件,幫助模型適應視覺差異。
色調 (Hue)
- 定義: 輕微改變色調。
- 使用場景: 適用於光照顏色(例如 LED 色溫)可能隨時間變化的環境。
飽和度 (Saturation)
- 定義: 調整顏色的強度。
- 使用場景: 幫助應對光照變化導致影象顯得暗淡或更鮮豔的情況。
幾何增強
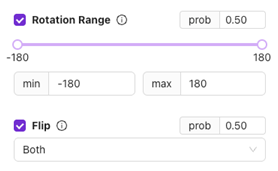
旋轉範圍 (Rotation Range)
- 定義: 在設定的範圍內隨機旋轉影象(例如 ±20°)。
- 使用場景: 適用於可能以略微旋轉位置出現的部件。
對於通常固定方向的部件,避免過度旋轉。
翻轉 (Flip)
- 定義: 水平、垂直或雙向翻轉影象。
- 使用場景: 適用於對稱部件或在搬運過程中方向可能翻轉的情況。
光照與顏色模擬

Planckian
- 定義: 模擬色溫變化(例如暖光或冷光)。
- 使用場景: 應對不同光源偏移或具有不同光源的工作單元。
高斯噪聲 (Gaussian Noise)
- 定義: 在影象中新增細微噪聲。
- 使用場景: 如果您的生產環境存在輕微的視覺噪聲或相機感測器偽影,可提高魯棒性。
運動模擬

運動模糊 (Motion Blur)
- 定義: 模擬部件在捕獲過程中移動產生的輕微模糊。
- 使用場景: 對於可能發生運動模糊的高速產線至關重要。
機率 (prob)
![]()
- 定義: 設定在訓練過程中應用每種資料增強的機率。
- 示例: 0.50 = 任何給定的訓練影象有 50% 的機率應用該變化。
大多數資料增強從 0.5 開始,並根據實際變化情況進行調整。
訓練引數(分割)
訓練引數(也稱為超引數)是控制機器學習模型如何從資料中學習的設定。
學習率 (Learning Rate)

- 定義: 控制模型在訓練過程中更新內部權重的速度。
- 值 (0.003): 學習率越高,模型學習越快,但過高可能導致不穩定或精度較差。
- 滑塊範圍: 從 10^-4(非常慢)到 10^-1(非常快)。
通常情況下,0.001–0.01 之間的值是分割任務的良好起點。
ROI (Region of Interest) 大小

- 定義: 定義訓練期間使用的影象區域大小(寬度 × 高度)。
- 未勾選: 預設情況下,模型會根據您的資料自動確定 ROI。
- 勾選時: 如果需要一致的輸入尺寸(例如,所有影象裁剪為 256×256 畫素),您可以手動設定寬度和高度。
當您的資料集包含不同尺寸的影象,並且您希望獲得一致的輸入以提高穩定性、可重現性,或匹配已知的模型架構時,請使用固定尺寸(例如 256×256)。
當您的資料已具有統一解析度,或希望系統根據資料集的特性最佳化最佳感興趣區域時,請讓系統自動選擇。
迭代次數 (Epochs)

- 定義: 一個 epoch = 完整遍歷整個訓練資料集一次。
- 值 (100): 模型將訓練 100 個完整週期。
增加此數字通常可以在一定程度上提高精度,但會花費更長的時間。
經驗法則: 在訓練過程中監控訓練損失和驗證損失。如果驗證損失停止下降,而訓練損失繼續下降,則表明模型正在過擬合,您應當儘早停止訓練。
架構

- 定義: 選擇神經網路的大小和複雜度。
- Small: 訓練更快,對大多數資料集來說通常已足夠。非常適合快速實驗或較小的資料集。
- 更大的模型 可以捕獲更多細節,但在小資料集上可能會過擬合,而較小的模型在資料有限時效率更高,泛化能力更好。
從 Small 開始,它通常已足夠,並能幫助您在擴充套件之前更快地迭代。
外部 GPU

請聯絡支援人員以瞭解更多關於外部 GPU 的資訊。
訓練引數(分類)
訓練引數(也稱為超引數)是控制 機器學習模型如何從資料中學習 的設定。
學習率

- 定義: 控制模型在訓練期間更新其內部權重的速度。
- 值 (0.003): 學習率越高,模型學習越快,但過高可能導致不穩定或精度不佳。
- 滑塊範圍: 從 10^-4(非常慢)到 10^-1(非常快)。
通常,0.001–0.01 之間的值是分割任務的良好起點。
驗證集百分比

- 定義: 定義將資料集中多大比例的資料用於驗證(訓練期間的測試)。
- 目的: 驗證資料有助於監控模型在未見樣本上的表現,防止過擬合。
- 範圍: 0–50%。
常見的選擇是 10–20%。
如果設定為 0%,則所有資料都用於訓練,這可能會提高訓練精度,但更難檢測過擬合。
ROI(感興趣區域)尺寸
- 定義: 定義訓練期間使用的影象區域的尺寸(寬 × 高)。
- 未勾選時: 預設情況下,模型根據您的資料自動確定 ROI。
- 勾選時: 如果您需要一致的輸入尺寸(例如,所有影象都裁剪為 256×256 畫素),可以手動設定寬度和高度。
當您的資料集包含不同尺寸的影象,並且您希望獲得一致的輸入以提高穩定性、可重現性或匹配已知的模型架構時,請使用固定尺寸(例如 256×256)。
當您的資料已具有統一的解析度,或者您希望系統根據資料集特徵最佳化最佳感興趣區域時,請讓其自動選擇。
迭代次數(Epochs)
- 定義: 一個 epoch = 完整遍歷整個訓練資料集一次。
- 值 (100): 模型將進行 100 次完整訓練遍歷。
增加此數值通常會在一定程度上提高準確度,但訓練時間會更長。
經驗法則: 在訓練期間監控訓練損失和驗證損失。如果驗證損失停止下降而訓練損失繼續下降,則表明模型出現過擬合,您應提前停止訓練。
架構
- 定義: 選擇神經網路的規模和複雜度。
- Small: 訓練速度更快,通常足以應對大多數資料集。非常適合快速實驗或小型資料集。
從 Small 開始,它通常已經足夠,並能幫助您在擴大規模之前更快地迭代。
| 架構與相機 | 描述 | 推薦用途 |
|---|---|---|
| ConvNeXt-Pico | 超輕量模型,針對速度和低記憶體使用進行了最佳化。 | 非常適合快速實驗或硬體資源有限的場景。 |
| ConvNeXt-Nano | 比 Pico 略大;以極小的額外成本獲得更好的準確度。 | 在中小型資料集上取得良好平衡。 |
| ConvNeXt-Tiny | 在保持高效的同時提供更高的準確度。 | 適用於中等規模的資料集和較長的訓練週期。 |
| ConvNeXt-Small | 此列表中能力最強的變體。具有更高的容量和準確度。 | 適用於大型資料集或需要最高效能的場景。 |
外部 GPU
如需瞭解更多關於外部 GPU 的資訊,請聯絡支援團隊。