AI 驅動文件
您想了解什麼?
第五步:設定輸出
您的 AI 模型已訓練完成。現在決定相機如何處理每個透過/失敗結果——以及將結果傳送到何處。
需要回答兩個問題:
- 透過/失敗如何計算? 基本模式(規則)或高階模式(Node-RED)。
- 結果傳送到哪裡? 獨立執行(僅相機 UI)、傳送到 PLC,或傳送到物理數字輸出。
這兩個問題是獨立的。請在下方選擇您需要的場景,以確定所需的模式 + 目的地組合,然後詳細閱讀相關章節。
What are you trying to do?
Pick your scenario — see exactly which mode and destination you need
The page below covers everything in detail. This picker is a shortcut to the right combination for your line.
Operators read pass/fail from the screen. No PLC, no external wiring beyond power and Ethernet to a laptop or HMI.
What to do
- Configure pass/fail rules in the IO Block (Basic mode).
- Done — results show on Live Preview and saved captures.
全域性透過/失敗
每次捕獲都會產生一個二元結果:透過或失敗。即使您有 50 個感興趣區域 (ROI) 在執行復雜的分析,最終都歸結為一個答案:這個零件是好還是壞?
這個全域性透過/失敗結果就是傳送給您的 PLC、HMI、堆疊指示燈、剔除閘門或任何其他系統的內容。相機在每次捕獲時都會計算它;基本模式和高階模式之間的區別在於如何表達產生該結果的規則。
選擇邏輯模式
基本模式 — 何時使用
當您的透過/失敗規則是各 ROI 結果的簡單組合時,請使用基本模式。例如:
- "所有 ROI 必須為 class = 'pass' 才能全域性透過"
- "ROI 1 和 ROI 2 必須都等於 'present',ROI 3 必須等於 'aligned'"
- "每個 ROI 的類別置信度閾值"
如果您可以用一句話使用 AND / OR / 閾值描述您的規則,基本模式即可處理。無需程式碼,無需流程編輯器。
設定方法:
- 在程式編輯器中導航至 IO模組
- 為每個 ROI 設定規則(例如,class 必須等於 "pass")
- 選擇規則的組合方式——全部必須透過,或使用簡單的自定義表示式
- 儲存
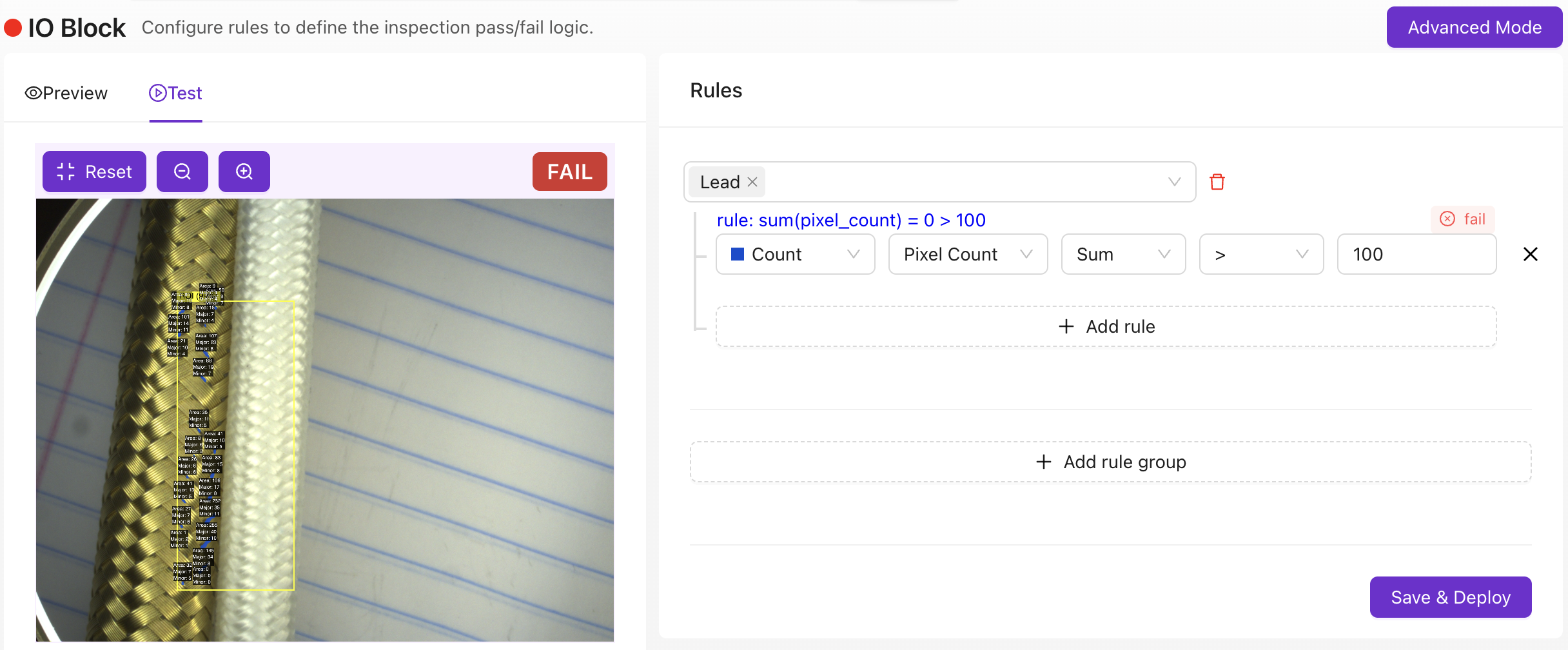
現在,相機將在每次捕獲時輸出透過/失敗結果。
基本模式產生的透過/失敗訊號供 PLC 和相機 UI 讀取。要驅動 OV10i 的物理數字輸出引腳(DO0 / DO1)——用於堆疊指示燈、剔除閘門或繼電器——您需要使用高階模式。請參閱下文的數字輸出 (DO0 / DO1)。
高階模式 — 何時使用
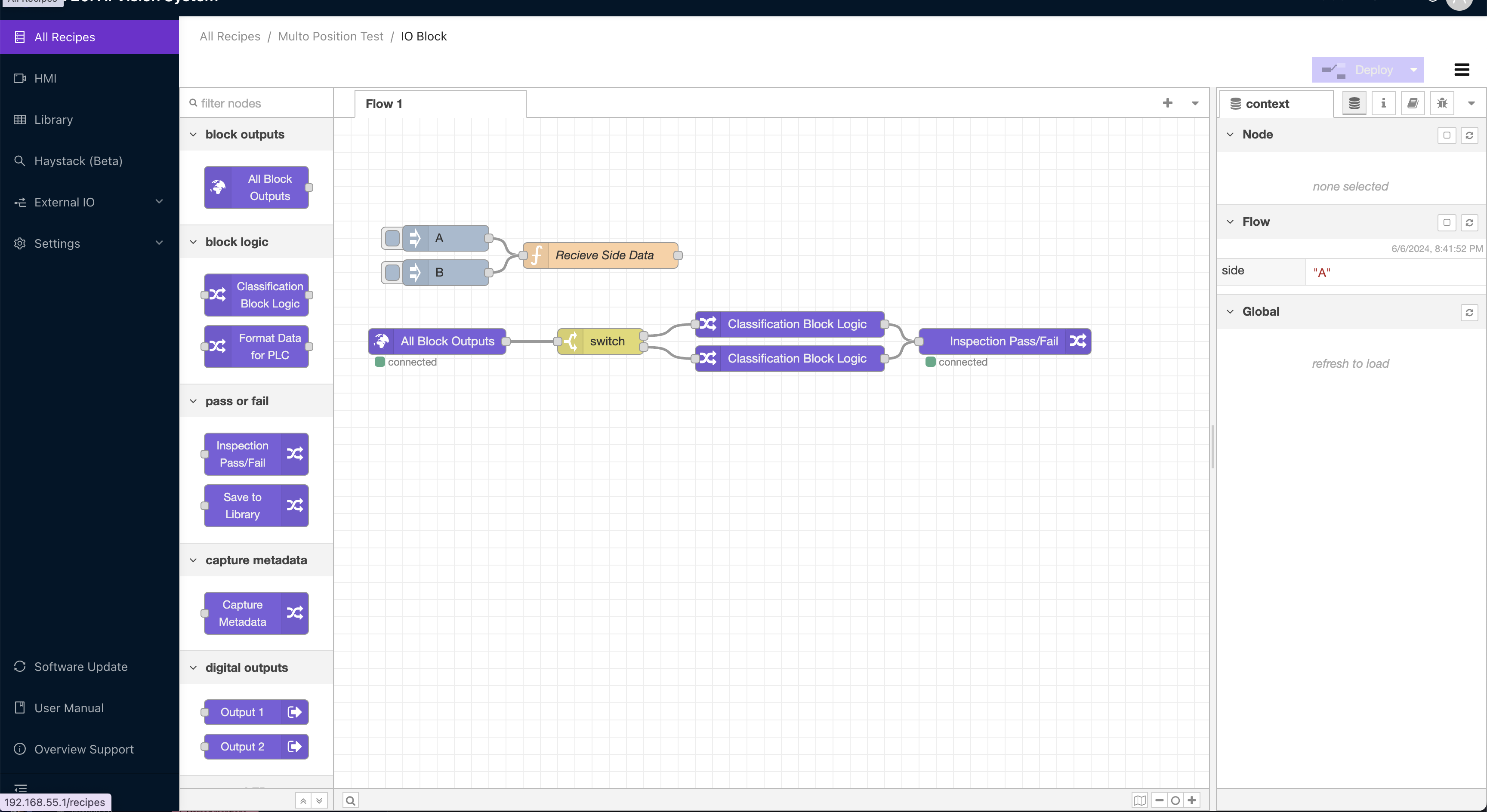
在 IO模組中點選高階模式,進入 Node-RED,這是一個視覺化程式設計環境。
在以下情況使用高階模式:
- 透過/失敗規則需要超出每個 ROI 閾值的邏輯——例如,"如果超過 N 個 ROI 為 'fail' 類別且平均置信度高於 80% 則失敗"
- 您需要時間序列邏輯——"如果最近 10 個零件中有 7 個失敗則失敗"
- 您需要驅動物理數字輸出(DO0 / DO1)以控制堆疊指示燈、剔除閘門或繼電器
- 您需要向 PLC 傳送超出標準透過/失敗 + ROI 負載的自定義資料(例如,PROFINET
User Data - 64 bytes模組,或額外的 EtherNet/IP 裝配欄位) - 您需要將資料路由到任何外部系統——MQTT、MES、FTP、REST API、電子郵件、Teams、資料庫
每次捕獲都會啟動一個新流程。"All Blocks Output" 節點將捕獲的所有後設資料作為 JSON 物件暴露——類別、置信度、ROI 名稱、時間戳——以便任何下游節點都可以基於任意欄位進行分支。
您可以構建的內容:
- 組合多個 ROI 欄位的自定義透過/失敗邏輯
- 堆疊指示燈、剔除閘門和繼電器控制(數字輸出)
- 時間序列分析("我最近 10 個零件中是否有 7 個失敗?通知主管")
- 自定義儀表板:帕累託圖、趨勢視覺化、生產指標
- 資料路由至 FTP、MES 系統、資料庫
- 條形碼整合,將檢測結果與零件序列號關聯
- 條件影象儲存(例如,僅在失敗時儲存)
- 電子郵件 / Teams / Slack 通知
- 通訊協議:RS232、RS485、MQTT、HTTP/HTTPS、OPC-UA
匯入和匯出流程
您可以將 Node-RED 流程匯入和匯出為 JSON 格式。這使您可以備份邏輯、在攝像頭之間共享流程,或部署由 Auto-Integration Builder 生成的流程。
要訪問匯入/匯出功能,請點選 Node-RED 編輯器右上角的漢堡選單(三條水平線):
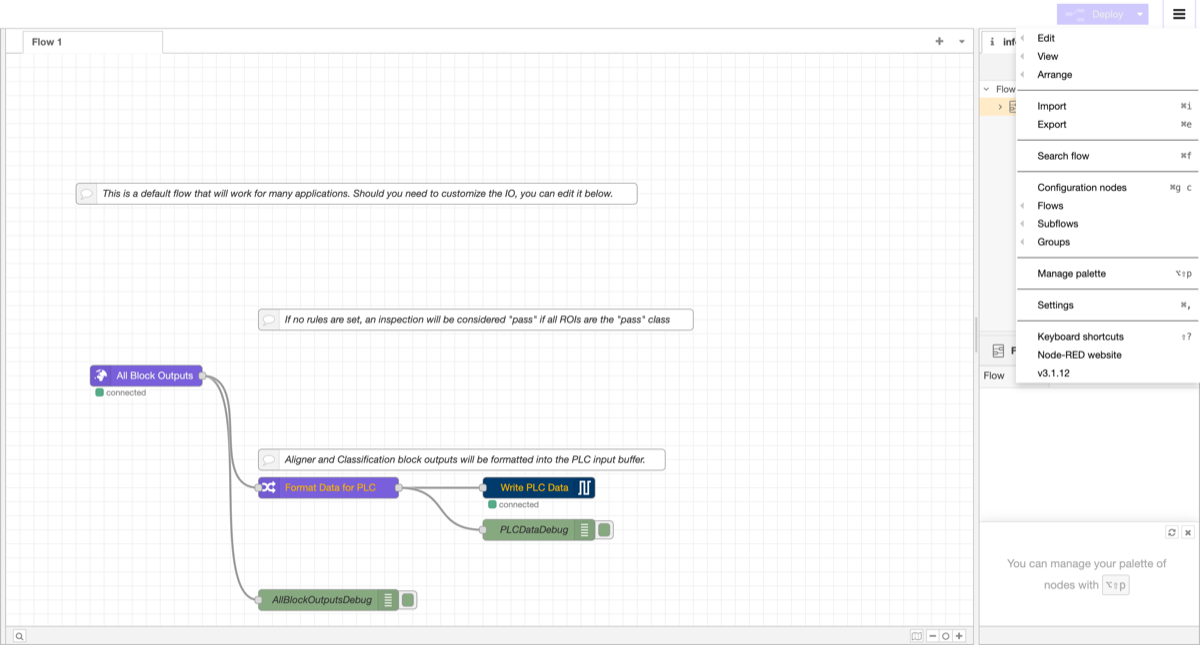
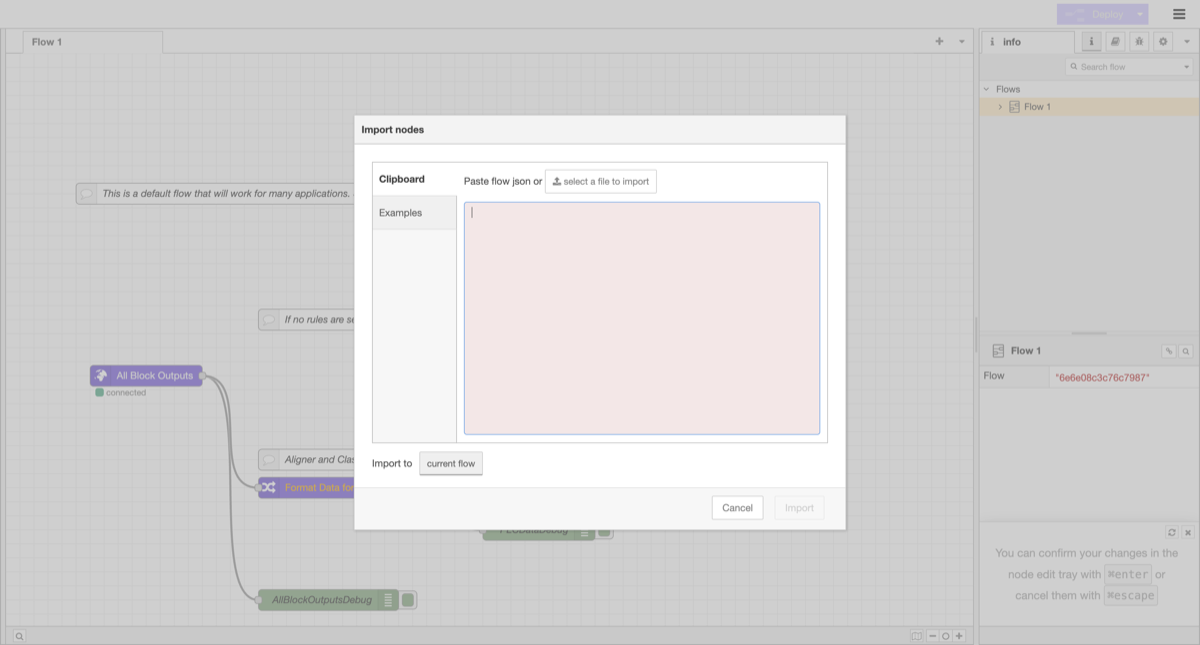
匯入流程: 從選單中選擇匯入。將流程 JSON 貼上到文字區域,或點選"選擇要匯入的檔案"上傳 JSON 檔案。選擇匯入到當前流程或新流程,然後點選匯入。
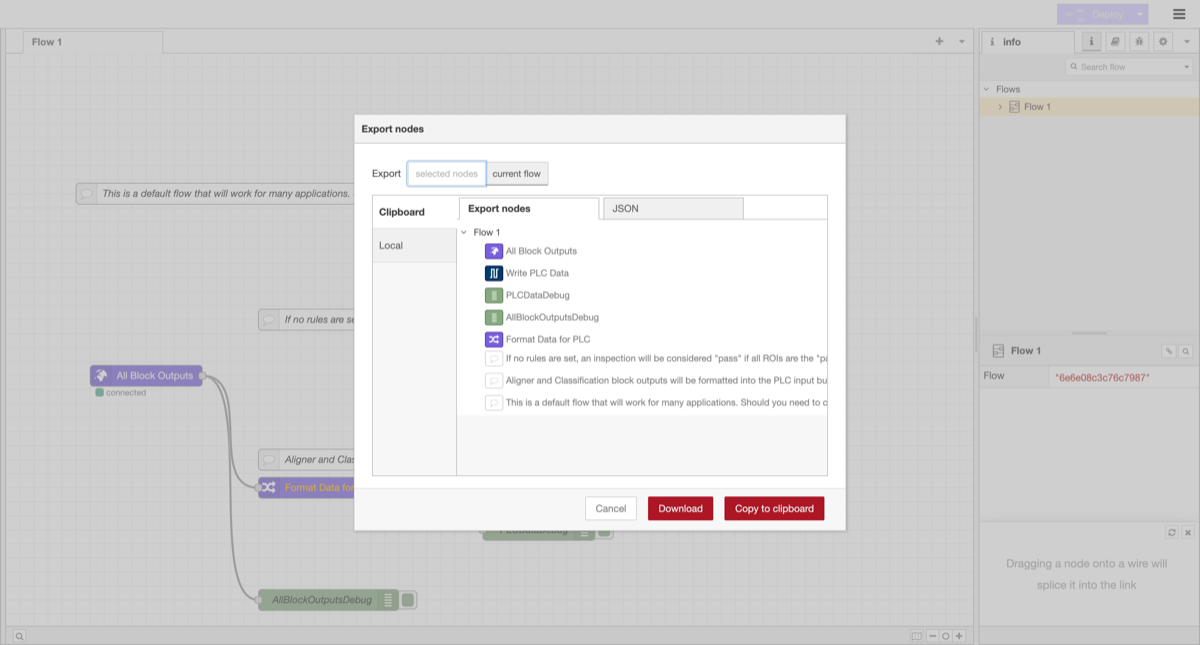
匯出流程: 從選單中選擇匯出。選擇要匯出的節點(選中的節點或當前流程),然後點選下載儲存為檔案,或點選複製到剪貼簿以貼上到其他位置。
使用 Auto-Integration Builder 即時構建流程
無需從頭學習 Node-RED。位於 tools.overview.ai 的 OV Auto-Integration Builder 可根據簡單的英文描述生成可用於生產的 Node-RED 流程。
工作原理:
- 開啟 tools.overview.ai 並選擇 Auto-Integration Builder
- 用簡單的英文描述您的需求。例如:"Send an email when 3 failures happen in a row" 或 "Save fail images to an FTP server with the part serial number"
- AI 使用 50 多種可用節點型別生成完整的 Node-RED 流程
- 檢查流程,一鍵部署到您的攝像頭
支援:
- 通訊協議: MQTT、Modbus TCP、OPC-UA、HTTP/HTTPS、RS232、RS485
- 資料路由: FTP、資料庫、MES 系統、雲端儲存
- 邏輯: 時序分析、條件分支、聚合
- 通知: 電子郵件、Microsoft Teams、Slack、webhooks
- 硬體 I/O: 訊號燈、剔除裝置、傳送帶、PLC
您還可以使用 Modify Mode:貼上現有流程並描述您要更改的內容。構建器將在保留現有邏輯的同時更新流程。
即使您從未使用過 Node-RED,Auto-Integration Builder 也能讓您在幾分鐘內完成複雜的整合設定。描述您的需求,檢視生成的流程,然後部署。
輸出目的地
您已決定如何計算 pass/fail。現在需要決定結果的去向。共有三個目的地,每個目的地都有不同的要求:
| 目的地 | 所需邏輯模式 | 使用場景 |
|---|---|---|
| 獨立執行(僅攝像頭 UI / 儲存的影象) | Basic 或 Advanced | 操作員從螢幕讀取 pass/fail;無其他系統需要該結果 |
| PLC(EtherNet/IP、PROFINET) | Basic 或 Advanced | PLC 驅動產線並需要檢測結果 |
| 數字輸出(DO0 / DO1) | 需要 Advanced (Node-RED) | 訊號燈、剔除裝置、繼電器或 I/O 聯結器上的任何物理裝置 |
您可以同時使用多個目的地 — 例如,透過 EtherNet/IP 將 pass/fail 傳送到 PLC,同時透過 DO0 驅動訊號燈。
獨立執行
如果相機就是整個系統——沒有 PLC,除了電源和連線到膝上型電腦或 HMI 的乙太網之外沒有其他外部接線——那麼除了配置 IO模組之外,您無需執行任何操作。透過/失敗結果會顯示在實時預覽螢幕上以及儲存的捕獲歷史記錄中。基本模式和高階模式均可使用;根據您的邏輯複雜度選擇即可。
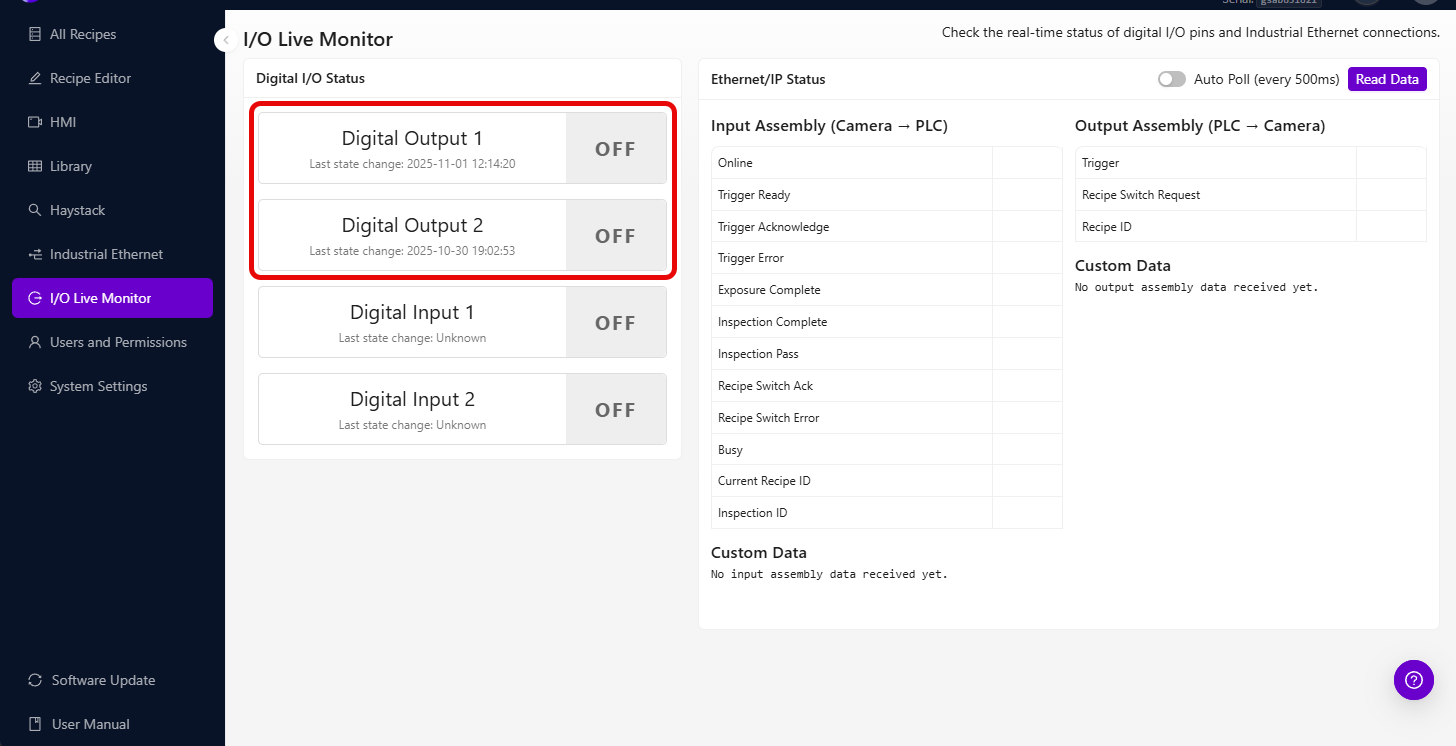
您可以在 I/O Live Monitor 頁面監控數字 I/O 引腳和 EtherNet/IP 連線的實時狀態:
PLC (EtherNet/IP 和 PROFINET)
OV10i 原生支援 EtherNet/IP 和 PROFINET,因此標準的透過/失敗結果和每個 ROI 的結果負載無需任何 Node-RED 即可傳輸到您的 PLC。您只需匯入 EDS 或 GSDML 檔案,將 PLC 指向相機的 IP,相機的標準 assembly / module 就會直接暴露結果欄位。
那麼何時需要 Node-RED 進行 PLC 整合?當標準負載不夠用時——例如,您想傳送額外的 ROI 欄位、自定義缺陷程式碼、計算值,或來自條碼掃描器的序列號。在這種情況下:
- EtherNet/IP:透過 Node-RED 流寫入自定義欄位來擴充套件 assembly
- PROFINET:在您的 TIA Portal 裝置配置中新增
User Data - 64 bytes和User Results - 64 bytes自定義模組,並透過 Node-RED 流寫入資料
接線、檔案和分步設定請參閱 Connect to PLC (EtherNet/IP & PROFINET)。
數字輸出 (DO0 / DO1)
OV10i 在 M12 聯結器上有兩個數字輸出——DO0(引腳 10,紫色)和 DO1(引腳 11,橙色)——均為 NPN 漏型,每路額定 100 mA。可用於驅動指示燈塔、剔除閘門、繼電器、指示 LED,或任何由 24V 漏型訊號觸發的裝置。
基本模式中沒有原生的"將透過訊號傳送到 DO0"開關。要根據檢測結果開啟或關閉引腳,您需要使用一個高階模式 Node-RED 流,並將 Digital Output 節點連線到檢測結果。這與處理您自定義邏輯的流程相同,因此如果您已出於任何原因處於高階模式,那麼驅動 DO 引腳只需再新增一個節點而已。
最簡單的"透過亮綠燈、失敗亮紅燈"流程使用兩個連線到透過/失敗分支的 Digital Output 節點。分步接線 + Node-RED 設定請參閱 Set Digital Output Logic。
一旦引腳接線完成並部署了流程,您可以編碼比透過/失敗更豐富的訊號——不同的缺陷類別可以對映到不同的引腳組合,或者您可以將引腳脈衝 N 毫秒來驅動單次觸發的剔除電磁閥。
I/O 板上的錯誤接線可能會損壞相機、連線的裝置或兩者都損壞。在連線到實際生產硬體之前,請始終使用萬用表驗證接線並進行臺架測試。
觸發模式
配置捕獲的觸發方式:
| 觸發方式 | 描述 | 適用場景 |
|---|---|---|
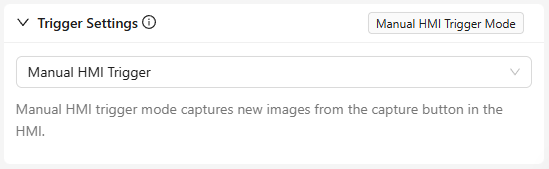
| Manual | 透過相機 UI 上的按鈕觸發 | 測試和設定 |
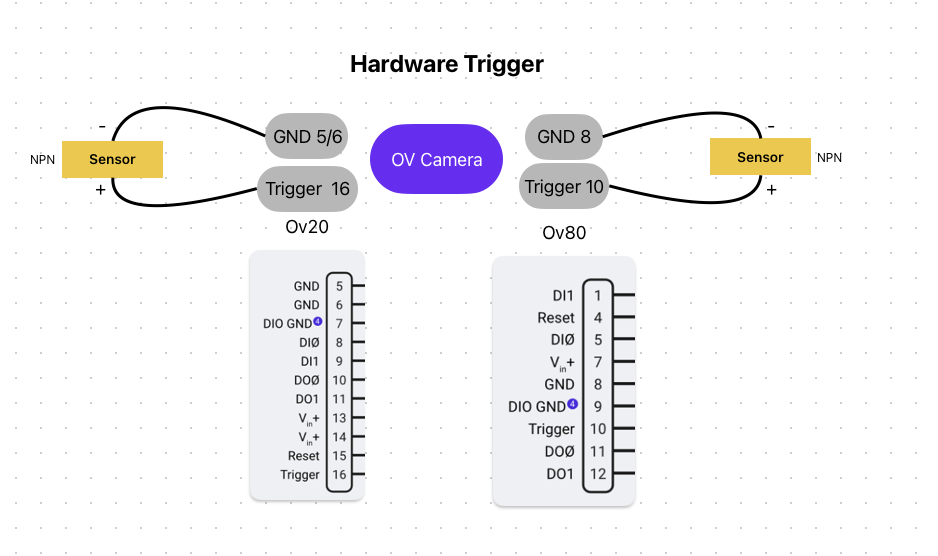
| Hardware (digital input) | 來自感測器的電訊號 | 配備接近感測器的自動化產線 |
| PLC | 來自工業控制器的命令 | 需要精確時序的全自動化場景 |
| Aligner | 檢測到零件對齊時自動觸發 | 零件到達時間不可預測時 |
| Interval | 按設定的時間間隔捕獲 | 持續監控 |
OV10i 數字輸出有最大電流額定值。在連線電磁閥、電機或大型繼電器等大功率裝置前,請檢視硬體規格。如負載超過額定輸出電流,請使用中間繼電器或驅動電路。
部署
- 啟用程式
- 設定觸發模式
- 執行測試零件,驗證 pass/fail 輸出符合預期
- 檢查邊緣情況,尤其是最難分類的零件
- 在第一小時內進行監控以確保一致性
下載 PLC 整合檔案
如果您要與 PLC 整合,請下載配置檔案和示例程式碼:
EtherNet/IP (Allen-Bradley)
| 檔案 | 描述 |
|---|---|
| OV10i EDS 檔案 | 用於 Studio 5000 (ControlLogix/CompactLogix) 的電子資料表 |
| 程式切換例程 | 用於透過 PLC 切換程式的梯形圖邏輯 |
| 相機觸發例程 | 用於觸發檢測並處理結果的梯形圖邏輯 |
PROFINET (Siemens)
| 檔案 | 描述 |
|---|---|
| OV10i GSDML 檔案 | 用於 TIA Portal 的裝置描述檔案 |
OV10i 使用與 OV20i 相同的 PLC 整合介面。這些配置檔案可同時相容兩款相機。
在配置連線之前,請將 EDS 或 GSDML 檔案匯入您的 PLC 程式設計環境。L5X 例程是開箱即用的梯形圖邏輯,可直接匯入 Studio 5000。
輸出檢查清單
正式上線前,請確認:
- 已配置 IO 規則(pass/fail 邏輯符合您的要求)
- 已設定觸發模式(manual、hardware、PLC、aligner 或 interval)
- 已啟用程式
- 已執行測試零件(pass/fail 輸出符合預期)
- 已測試邊緣情況(最難分類的零件能被正確分類)
您的 AI 檢測現已上線。如需持續最佳化,請參閱改進您的模型。