AI 驅動文件
您想了解什麼?
模板影象與對齊理論
本頁介紹基於模板的模式匹配的基本概念,以及 OV10i 如何使用邊緣檢測演算法來定位零件方位,從而實現精確的檢測定位。
基於模板的模式匹配基礎
什麼是模板對齊?
模板對齊使用模式匹配來定位零件方位,以進行相對檢測。系統檢測模板區域內的邊緣,並匹配相似的邊緣模式以確定零件的位置和方向,即使零件呈現方式不一致也能實現精準檢測。
核心概念:
- 參考模板 - 作為模式匹配基準的捕獲影象
- 邊緣模式識別 - 演算法識別獨特的邊緣特徵
- 空間變換 - 計算位置和旋轉差異
- ROI 調整 - 根據檢測到的零件位置對齊感興趣區域 (ROI)
模板影象理論
模板影象作為參考標準
捕獲模板影象是所有程式的必需步驟。模板影象作為主參考,所有後續影象都將與其進行對齊比較。
模板要求:
- 代表性樣本 - 必須以理想狀態和位置展示零件
- 清晰的邊緣定義 - 足夠的對比度以實現可靠的邊緣檢測
- 一致的特徵 - 在零件變化中保持穩定的元素
- 最佳照明 - 與生產環境相匹配的照明條件
影象質量對對齊的影響
關鍵質量因素:
- 邊緣對比度 - 更高的對比度可實現更可靠的邊緣檢測
- 對焦銳度 - 清晰的邊緣可提高模式匹配精度
- 照明一致性 - 均勻的照明可減少錯誤的邊緣檢測
- 影象穩定性 - 模板影象中的噪點和偽影最小化
模板影象設定與捕獲
模板影象捕獲方法
捕獲選項:
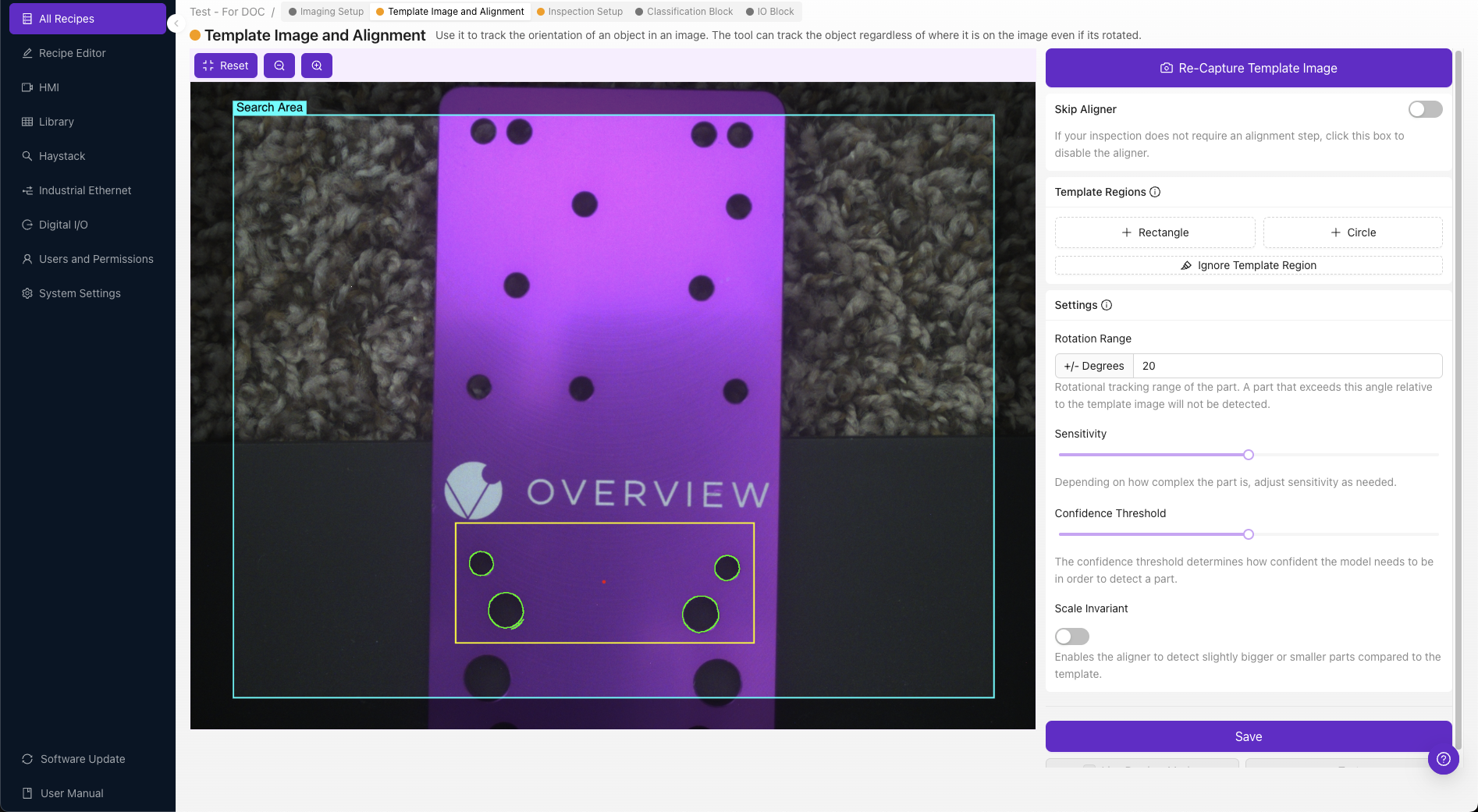
- Capture Template Image - 使用當前相機檢視拍攝新的參考影象
- Re-Capture Template Image - 用新影象替換現有模板
- Import From Library - 從庫中選擇現有影象作為模板
預設情況下,Import From Library 彈窗將按程式篩選影象。使用下拉選單選擇其他程式或清除篩選條件,然後點選 Search 以查詢其他程式中的影象。
預覽模式
- 模板檢視 - 捕獲後,預覽窗格將顯示模板影象(而非實時相機畫面)
- 實時預覽模式 - 切換到實時相機檢視以測試對齊效能
- 重新捕獲模式 - 禁用實時預覽以重新拍攝模板影象
用於對齊的邊緣檢測理論
對齊專用邊緣檢測
OV10i 對齊系統依靠專門用於零件定位的邊緣檢測演算法,獨立於基於 AI 的檢測模型。
對齊邊緣檢測過程:
- 邊緣識別 - 演算法檢測強度梯度作為對齊參考
- 邊緣篩選 - 系統識別與對齊相關的邊緣並過濾噪聲
- 對齊模式建立 - 構建用於定位的邊緣模式數學表示
- 位置比較 - 將檢測到的模式與模板參考進行比較以實現對齊
對齊區域策略
+ 矩形 / + 圓形區域: 模板區域定義了 OV10i 檢測邊緣以進行對齊的特定區域,透過匹配相似的邊緣圖案來確定零件的位置和方向。
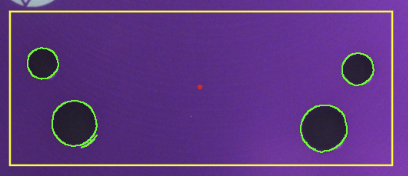
對齊邊緣視覺化:
- 🟢 綠色高亮 - 在模板區域內找到的邊緣(適用於對齊)
- 🔴 紅色高亮 - 找到的邊緣不足以進行有效對齊
用於對齊的邊緣質量
良好的對齊邊緣特徵:
- 簡單 - 清晰、明確的邊緣過渡,適合作為位置參考
- 獨特 - 具有獨特圖案,便於可靠地識別零件
- 一致 - 在所有預期的零件變體中可見,便於可靠對齊
- 穩定 - 在對齊期間不受正常生產變化的影響
不良的對齊邊緣特徵:
- 複雜紋理 - 不適合作為位置參考的細節表面
- 反光表面 - 產生不一致對齊參考的區域
- 可變特徵 - 在零件之間變化的元素,會影響對齊一致性
- 易產生噪聲的區域 - 有碎屑影響對齊精度的區域
模板區域管理
建立模板區域
+ 矩形 / + 圓形: 點選以向模板影象新增模板區域。OV10i 將在這些模板區域內檢測邊緣,並透過匹配相似的邊緣圖案來嘗試定位零件。
區域管理:
- 調整大小/形狀 - 點選模板區域以拉伸或更改大小
- 旋轉 - 根據需要調整區域方向
- 重新定位 - 點選並拖動以移動模板區域
- 刪除 - 移除不需要的區域
模板區域放置最佳實踐
放置模板區域時,應聚焦於簡單、獨特且在所有零件上都能持續可見的邊緣。儘量避免可能被缺陷遮擋的邊緣,或在零件之間存在變化的邊緣圖案。
良好的邊緣特徵:
- ✅ 簡單 - 清晰、明確的邊緣
- ✅ 獨特 - 在其他位置找不到的獨特圖案
- ✅ 一致 - 在所有零件變體中都可見
- ✅ 穩定 - 不受正常缺陷或磨損的影響
不良的邊緣特徵:
- ❌ 可變特徵 - 可能缺失或損壞的部件
- ❌ 紋理表面 - 在零件之間存在差異的複雜圖案
- ❌ 反光區域 - 產生可變高光的表面
- ❌ 細小細節 - 容易被碎屑遮擋的特徵
漸進式設定方法
多模板區域策略:
- 從最顯著的特徵上的一個模板區域開始
- 如果邊緣數量不足(紅色高亮),則新增更多區域
- 必要時提高靈敏度以找到足夠的邊緣
- 使用忽略模板區域工具來移除噪聲
- 使用實時預覽模式在不同零件變體上進行測試
對齊引數理論
旋轉範圍容差
輸入 0-180 度的角度,以定義對齊器可容忍的旋轉量。
旋轉範圍設定:
- 180 度 - 查詢以任意角度旋轉的零件(最大靈活性)
- 0 度 - 僅查詢與模板影象角度匹配的零件(最高精度)
- 自定義範圍 - 在靈活性和精度之間取得平衡
權衡:
- 更寬範圍 - 更靈活,但處理速度可能較慢
- 更窄範圍 - 處理速度更快,但要求零件方向一致
靈敏度演算法原理
調整滑塊以增加/減少邊緣查詢靈敏度。較高的靈敏度設定將查詢更多邊緣,較低的靈敏度設定將查詢更少邊緣。
靈敏度影響:
- 更高靈敏度 - 檢測更多邊緣細節,但可能包含噪聲
- 更低靈敏度 - 聚焦於顯著邊緣,但可能遺漏細微特徵
- 最佳設定 - 在仍能找到足夠邊緣的前提下使用最低靈敏度

演算法行為: 對齊邊緣檢測演算法根據靈敏度設定調整其閾值,影響哪些強度梯度被分類為用於對齊的邊緣。
置信度閾值原理
使用此滑塊設定對齊被視為有效所需的最低置信度(1% 表示完全匹配)。該閾值應介於 0.6-0.9 之間,以實現一致的對齊。
置信度計算:
- 對齊圖案相關性 - 模板與檢測到的對齊圖案之間的數學相似度
- 幾何一致性 - 用於定位的邊緣特徵之間的空間關係準確度
- 對齊邊緣質量 - 檢測到的邊緣圖案作為位置參考的強度和清晰度
閾值指南:
- 0.6-0.9 範圍 - 推薦用於一致的對齊效能
- 較高值 - 匹配更嚴格,減少誤報
- 較低值 - 匹配更寬鬆,可能接受較差的對齊

對齊噪聲管理原理
忽略模板區域以進行對齊
忽略模板區域工具提供畫筆介面,用於從任何模板區域中擦除不需要的邊緣,用於遮蔽不需要的邊緣噪聲,並使對齊聚焦於清晰、可重複的邊緣圖案。
對齊邊緣噪聲類別:
- 紋理表面 - 不適合作為一致對齊參考的複雜圖案
- 反射和眩光 - 影響對齊精度的可變光照效果
- 碎屑或汙染 - 不適合作為位置參考的臨時特徵
- 可變元件 - 可能缺失或損壞的特徵,影響對齊一致性
對齊噪聲過濾策略:
- 選擇性遮蔽 - 移除可變邊緣圖案,同時保留穩定的對齊特徵
- 圖案簡化 - 使對齊演算法聚焦於最可靠的邊緣資訊
- 一致性最佳化 - 提升零件變化情況下的對齊可靠性
對齊圖案匹配效能原理
用於對齊的多個模板區域
新增更多模板區域會增加用於對齊的邊緣數量,從而提升對齊圖案匹配的可靠性和特異性。
多區域對齊優勢:
- 對齊冗餘 - 多個參考點提升對齊魯棒性
- 位置特異性 - 更復雜的圖案減少誤報對齊匹配
- 對齊精度 - 額外的約束提升位置和旋轉精度
- 對齊可靠性 - 即使某些區域被遮擋,系統仍可完成對齊
對齊故障模式
常見對齊故障模式:
- 對齊邊緣不足 - 模式資訊不足以進行可靠的位置檢測
- 對齊誤報 - 演算法匹配了錯誤的特徵進行定位
- 對齊檢測不一致 - 對齊在某些零件上有效,但在其他零件上失敗
- 對齊置信度低 - 位置匹配低於可接受閾值
對齊最佳化解決方案:
- 對齊模式最佳化 - 選擇更具特徵性和穩定性的邊緣特徵用於定位
- 區域調整 - 修改模板區域的大小和位置以獲得更好的對齊參考
- 引數調優 - 調整靈敏度和置信度閾值以最佳化對齊效能
- 對齊噪聲抑制 - 使用 Ignore Template Region 工具過濾有問題的邊緣
對齊與固定定位理論
何時使用模板對齊
對齊優勢:
- 零件差異容忍度 - 適應位置和旋轉差異
- 靈活的呈現方式 - 適用於非固定夾具的零件
- 相對檢測 - ROI 自動調整以適應零件位置
- 機器人整合 - 處理零件位置的變化
何時跳過對齊
固定位置優勢:
- 處理速度 - 無需對齊計算
- 一致的結果 - 可預測的檢測行為
- 設定簡單 - 無需模板區域或模式匹配
- 對固定夾具零件可靠 - 當機械定位確保一致性時
選擇標準: 對於使用夾具固定或以高度重複方式呈現給相機的零件,建議使用 Skip Aligner 選項。