AI 驱动文档
您想了解什么?
模板图像与对齐理论
本页介绍基于模板的模式匹配的基本概念,以及 OV10i 如何使用边缘检测算法来定位零件方位,从而实现精确的检测定位。
基于模板的模式匹配基础
什么是模板对齐?
模板对齐使用模式匹配来定位零件方位,以进行相对检测。系统检测模板区域内的边缘,并匹配相似的边缘模式以确定零件的位置和方向,即使零件呈现方式不一致也能实现精准检测。
核心概念:
- 参考模板 - 作为模式匹配基准的捕获图像
- 边缘模式识别 - 算法识别独特的边缘特征
- 空间变换 - 计算位置和旋转差异
- ROI 调整 - 根据检测到的零件位置对齐感兴趣区域 (ROI)
模板图像理论
模板图像作为参考标准
捕获模板图像是所有程序的必需步骤。模板图像作为主参考,所有后续图像都将与其进行对齐比较。
模板要求:
- 代表性样本 - 必须以理想状态和位置展示零件
- 清晰的边缘定义 - 足够的对比度以实现可靠的边缘检测
- 一致的特征 - 在零件变化中保持稳定的元素
- 最佳照明 - 与生产环境相匹配的照明条件
图像质量对对齐的影响
关键质量因素:
- 边缘对比度 - 更高的对比度可实现更可靠的边缘检测
- 对焦锐度 - 清晰的边缘可提高模式匹配精度
- 照明一致性 - 均匀的照明可减少错误的边缘检测
- 图像稳定性 - 模板图像中的噪点和伪影最小化
模板图像设置与捕获
模板图像捕获方法
捕获选项:
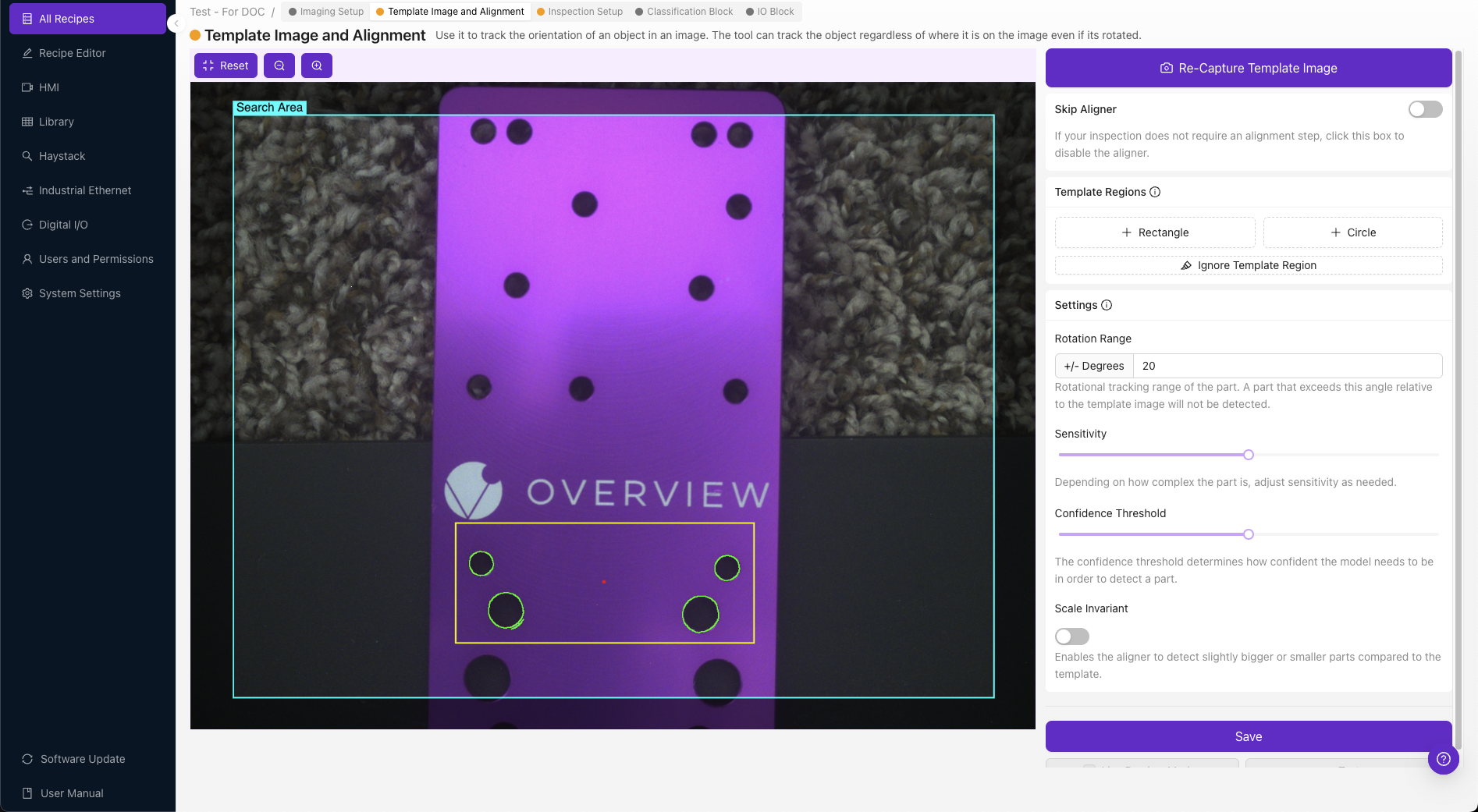
- Capture Template Image - 使用当前相机视图拍摄新的参考图像
- Re-Capture Template Image - 用新图像替换现有模板
- Import From Library - 从库中选择现有图像作为模板
默认情况下,Import From Library 弹窗将按程序筛选图像。使用下拉菜单选择其他程序或清除筛选条件,然后点击 Search 以查找其他程序中的图像。
预览模式
- 模板视图 - 捕获后,预览窗格将显示模板图像(而非实时相机画面)
- 实时预览模式 - 切换到实时相机视图以测试对齐性能
- 重新捕获模式 - 禁用实时预览以重新拍摄模板图像
用于对齐的边缘检测理论
对齐专用边缘检测
OV10i 对齐系统依靠专门用于零件定位的边缘检测算法,独立于基于 AI 的检测模型。
对齐边缘检测过程:
- 边缘识别 - 算法检测强度梯度作为对齐参考
- 边缘筛选 - 系统识别与对齐相关的边缘并过滤噪声
- 对齐模式创建 - 构建用于定位的边缘模式数学表示
- 位置比较 - 将检测到的模式与模板参考进行比较以实现对齐
对齐区域策略
+ 矩形 / + 圆形区域: 模板区域定义了 OV10i 检测边缘以进行对齐的特定区域,通过匹配相似的边缘图案来确定零件的位置和方向。
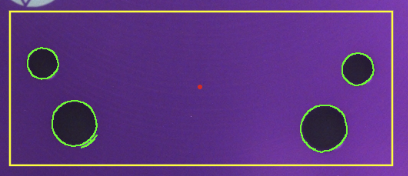
对齐边缘可视化:
- 🟢 绿色高亮 - 在模板区域内找到的边缘(适用于对齐)
- 🔴 红色高亮 - 找到的边缘不足以进行有效对齐
用于对齐的边缘质量
良好的对齐边缘特征:
- 简单 - 清晰、明确的边缘过渡,适合作为位置参考
- 独特 - 具有独特图案,便于可靠地识别零件
- 一致 - 在所有预期的零件变体中可见,便于可靠对齐
- 稳定 - 在对齐期间不受正常生产变化的影响
不良的对齐边缘特征:
- 复杂纹理 - 不适合作为位置参考的细节表面
- 反光表面 - 产生不一致对齐参考的区域
- 可变特征 - 在零件之间变化的元素,会影响对齐一致性
- 易产生噪声的区域 - 有碎屑影响对齐精度的区域
模板区域管理
创建模板区域
+ 矩形 / + 圆形: 点击以向模板图像添加模板区域。OV10i 将在这些模板区域内检测边缘,并通过匹配相似的边缘图案来尝试定位零件。
区域管理:
- 调整大小/形状 - 点击模板区域以拉伸或更改大小
- 旋转 - 根据需要调整区域方向
- 重新定位 - 点击并拖动以移动模板区域
- 删除 - 移除不需要的区域
模板区域放置最佳实践
放置模板区域时,应聚焦于简单、独特且在所有零件上都能持续可见的边缘。尽量避免可能被缺陷遮挡的边缘,或在零件之间存在变化的边缘图案。
良好的边缘特征:
- ✅ 简单 - 清晰、明确的边缘
- ✅ 独特 - 在其他位置找不到的独特图案
- ✅ 一致 - 在所有零件变体中都可见
- ✅ 稳定 - 不受正常缺陷或磨损的影响
不良的边缘特征:
- ❌ 可变特征 - 可能缺失或损坏的部件
- ❌ 纹理表面 - 在零件之间存在差异的复杂图案
- ❌ 反光区域 - 产生可变高光的表面
- ❌ 细小细节 - 容易被碎屑遮挡的特征
渐进式设置方法
多模板区域策略:
- 从最显著的特征上的一个模板区域开始
- 如果边缘数量不足(红色高亮),则添加更多区域
- 必要时提高灵敏度以找到足够的边缘
- 使用忽略模板区域工具来移除噪声
- 使用实时预览模式在不同零件变体上进行测试
对齐参数理论
旋转范围容差
输入 0-180 度的角度,以定义对齐器可容忍的旋转量。
旋转范围设置:
- 180 度 - 查找以任意角度旋转的零件(最大灵活性)
- 0 度 - 仅查找与模板图像角度匹配的零件(最高精度)
- 自定义范围 - 在灵活性和精度之间取得平衡
权衡:
- 更宽范围 - 更灵活,但处理速度可能较慢
- 更窄范围 - 处理速度更快,但要求零件方向一致
灵敏度算法原理
调整滑块以增加/减少边缘查找灵敏度。较高的灵敏度设置将查找更多边缘,较低的灵敏度设置将查找更少边缘。
灵敏度影响:
- 更高灵敏度 - 检测更多边缘细节,但可能包含噪声
- 更低灵敏度 - 聚焦于显著边缘,但可能遗漏细微特征
- 最佳设置 - 在仍能找到足够边缘的前提下使用最低灵敏度

算法行为: 对齐边缘检测算法根据灵敏度设置调整其阈值,影响哪些强度梯度被分类为用于对齐的边缘。
置信度阈值原理
使用此滑块设置对齐被视为有效所需的最低置信度(1% 表示完全匹配)。该阈值应介于 0.6-0.9 之间,以实现一致的对齐。
置信度计算:
- 对齐图案相关性 - 模板与检测到的对齐图案之间的数学相似度
- 几何一致性 - 用于定位的边缘特征之间的空间关系准确度
- 对齐边缘质量 - 检测到的边缘图案作为位置参考的强度和清晰度
阈值指南:
- 0.6-0.9 范围 - 推荐用于一致的对齐性能
- 较高值 - 匹配更严格,减少误报
- 较低值 - 匹配更宽松,可能接受较差的对齐

对齐噪声管理原理
忽略模板区域以进行对齐
忽略模板区域工具提供画笔界面,用于从任何模板区域中擦除不需要的边缘,用于屏蔽不需要的边缘噪声,并使对齐聚焦于清晰、可重复的边缘图案。
对齐边缘噪声类别:
- 纹理表面 - 不适合作为一致对齐参考的复杂图案
- 反射和眩光 - 影响对齐精度的可变光照效果
- 碎屑或污染 - 不适合作为位置参考的临时特征
- 可变组件 - 可能缺失或损坏的特征,影响对齐一致性
对齐噪声过滤策略:
- 选择性屏蔽 - 移除可变边缘图案,同时保留稳定的对齐特征
- 图案简化 - 使对齐算法聚焦于最可靠的边缘信息
- 一致性优化 - 提升零件变化情况下的对齐可靠性
对齐图案匹配性能原理
用于对齐的多个模板区域
添加更多模板区域会增加用于对齐的边缘数量,从而提升对齐图案匹配的可靠性和特异性。
多区域对齐优势:
- 对齐冗余 - 多个参考点提升对齐鲁棒性
- 位置特异性 - 更复杂的图案减少误报对齐匹配
- 对齐精度 - 额外的约束提升位置和旋转精度
- 对齐可靠性 - 即使某些区域被遮挡,系统仍可完成对齐
对齐故障模式
常见对齐故障模式:
- 对齐边缘不足 - 模式信息不足以进行可靠的位置检测
- 对齐误报 - 算法匹配了错误的特征进行定位
- 对齐检测不一致 - 对齐在某些零件上有效,但在其他零件上失败
- 对齐置信度低 - 位置匹配低于可接受阈值
对齐优化解决方案:
- 对齐模式优化 - 选择更具特征性和稳定性的边缘特征用于定位
- 区域调整 - 修改模板区域的大小和位置以获得更好的对齐参考
- 参数调优 - 调整灵敏度和置信度阈值以优化对齐性能
- 对齐噪声抑制 - 使用 Ignore Template Region 工具过滤有问题的边缘
对齐与固定定位理论
何时使用模板对齐
对齐优势:
- 零件差异容忍度 - 适应位置和旋转差异
- 灵活的呈现方式 - 适用于非固定夹具的零件
- 相对检测 - ROI 自动调整以适应零件位置
- 机器人集成 - 处理零件位置的变化
何时跳过对齐
固定位置优势:
- 处理速度 - 无需对齐计算
- 一致的结果 - 可预测的检测行为
- 设置简单 - 无需模板区域或模式匹配
- 对固定夹具零件可靠 - 当机械定位确保一致性时
选择标准: 对于使用夹具固定或以高度重复方式呈现给相机的零件,建议使用 Skip Aligner 选项。