AI 驅動文件
您想了解什麼?
使用對齊器工具
對齊器工具是 OV10i 上最強大的功能之一。它使用基於邊緣的模板匹配來跟蹤工件在不同捕獲之間的移動、旋轉或偏移。正確配置後,您的感興趣區域 (ROI) 會動態跟隨工件,因此無論工件如何呈現,每次檢查都能精確裁剪到正確的區域。本指南將引導您瞭解對齊器的每項功能,解釋每個設定的作用,並分享可為您節省數小時故障排除時間的專家技巧。
OV10i 攝像頭的設定遵循嚴格的瀑布流程。對齊器位於第 2 步——在影象設定之後、ROI 配置之前。如果您更改了對齊器上游的任何內容(鏡頭、光照、鏡頭畸變校正、攝像頭位置),您必須重新捕獲模板影象並重新進行對齊。跳過此步驟將導致下游出現難以診斷的細微故障。
對齊器的實際作用
每次攝像頭捕獲影象時,對齊器都會在任何 AI 檢查發生之前執行。它會:
- 掃描新影象,查詢與您定義的模板匹配的邊緣模式
- 計算偏移量——工件在 X、Y、旋轉以及可選的尺度上移動了多少
- 移動所有 ROI 以匹配檢測到的工件位置
- 報告置信度分數,表明匹配的可靠程度
如果置信度分數低於您的閾值,對齊器將報告失敗——您可以選擇跳過檢查或將該捕獲標記為不合格。
結果是:您可以使用更小、更緊湊的 ROI,因為它們不需要為工件移動留出巨大的安全餘量。更小的 ROI 意味著更好的訊雜比,這意味著 AI 需要更少的訓練資料就能產生更準確的結果。
對齊器僅支援 2D——它在與攝像頭正交的平面內工作。它可以處理平移(X/Y 偏移)、旋轉和輕微的尺度變化(±10%)。它不處理翹曲工件、彎曲工件或 3D 透視變換。如果您的工件存在顯著的 3D 變化,請跳過對齊器,改用具有位置不變性屬性的分割器。
先決條件
在配置對齊器之前,請確保您已完成:
- 物理影象設定——穩固的安裝、正確的鏡頭、均勻的光照
- 鏡頭畸變校正——在捕獲模板之前在影象設定中設定此項
- 畫面構圖良好的工件——工件應儘可能充滿畫面,以最大化畫素解析度
對齊器頁面概覽
在程式編輯器中開啟您的程式,然後單擊左側導航選單中的 "Template Image and Alignment"(模板影象與對齊)。
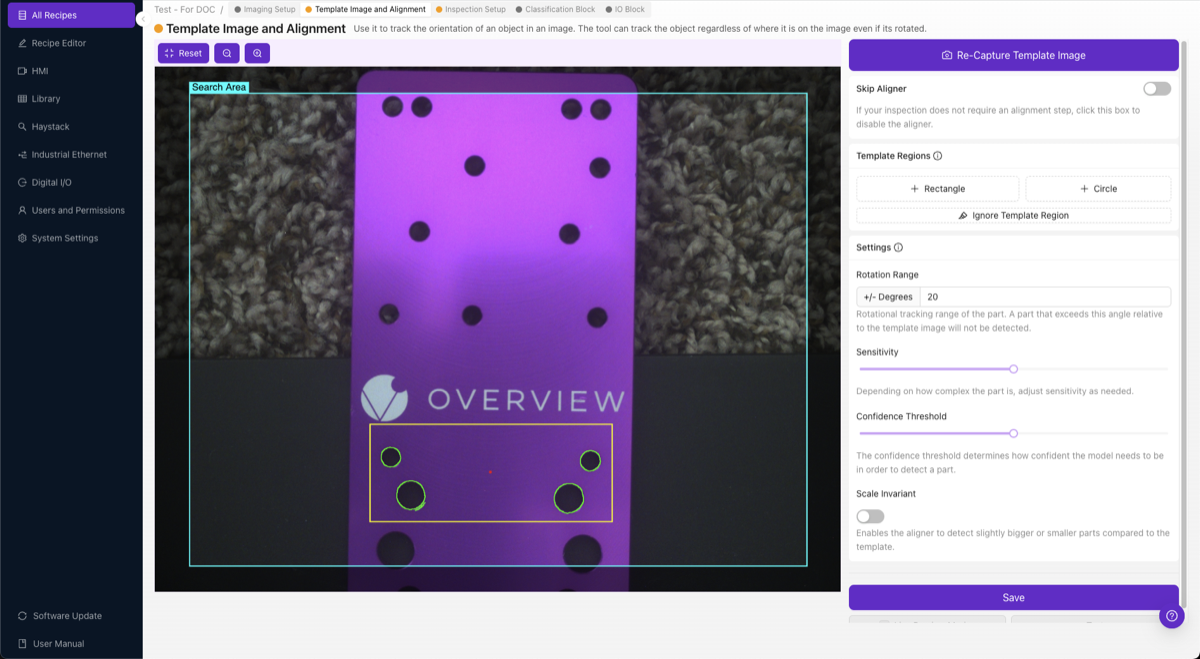
該頁面有兩個主要區域:
- 左側:影象預覽——顯示您的模板影象,上面繪製有模板區域。邊緣高亮顯示在區域內(綠色 = 檢測到良好邊緣,紅色 = 邊緣不足)。
- 右側:設定面板——包含所有控制元件:Skip Aligner 開關、模板區域工具、旋轉範圍、靈敏度、置信度閾值、尺度不變以及儲存按鈕。
在頂部,您將看到 Re-Capture Template Image(重新捕獲模板影象)按鈕用於重新獲取模板,以及用於 Snap(快照模式)和 Live(實時預覽模式)的切換按鈕。
第一步:捕獲模板影象
模板影象是對齊器用於查詢部件的參考照片。將良好的示例部件放置在相機的視野內,然後點選重新捕獲模板影象。
您的模板部件應該:
- 光照良好,邊緣清晰銳利——均勻照明,無強烈陰影
- 乾淨,表面無碎屑、油汙或汙染物
- 具代表性,為正常、無缺陷的部件
- 位置大致位於生產過程中部件通常出現的位置
不要使用有缺陷的部件作為模板。對齊器從此影象中匹配邊緣圖案,因此模板部件上的任何異常都會成為系統期望在每個部件上看到的圖案的一部分。
捕獲完成後,預覽窗格從實時相機切換為靜態模板影象。您將在此模板影象上定義區域。
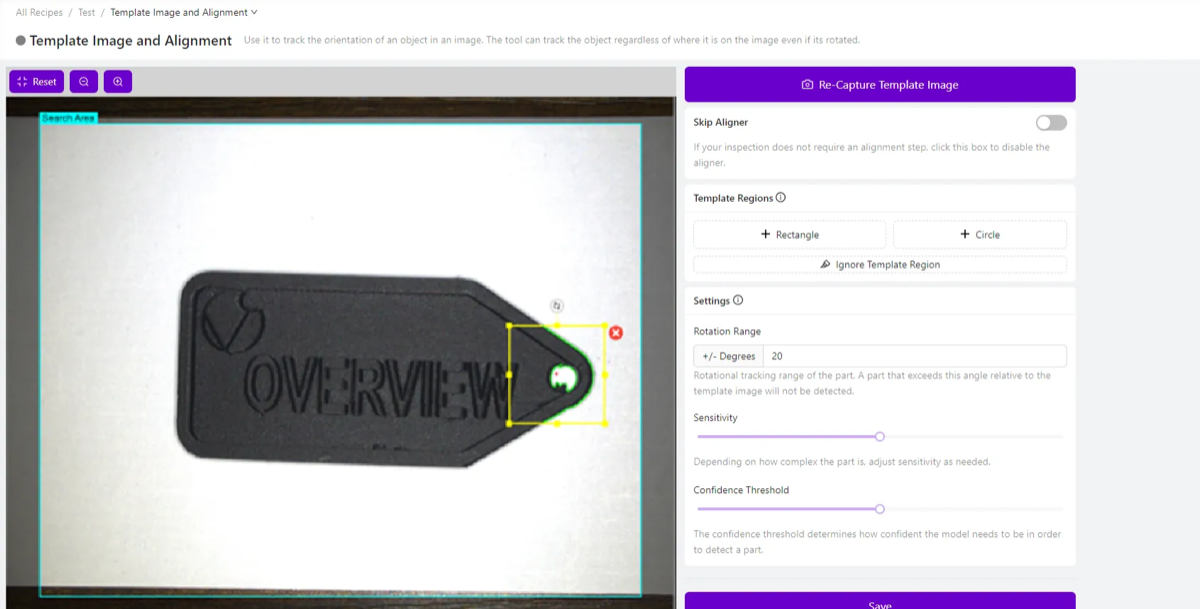
第二步:新增模板區域
模板區域告訴對齊器在模板影象上何處查詢邊緣圖案。您正在圍繞獨特特徵繪製矩形(或圓形),對齊器將使用這些特徵作為錨點。
新增區域
在模板區域面板中點選 + 矩形或 + 圓形,以建立新區域。
放置後,您可以:
- 點選並拖動區域以重新定位
- 拖動角部手柄以調整大小
- 點選區域以訪問旋轉、調整大小或刪除選項
什麼是好的模板區域
選擇以下邊緣:
- 簡單——清晰、明確的過渡(角、孔、加工邊緣)
- 獨特——圖案具有足夠的獨特性,不會匹配到隨機背景特徵
- 一致——在每個透過的部件上都存在且相同
- 穩定——不位於易受缺陷、汙染或磨損影響的區域
避免將區域放置在:
- 有紋理或粗糙的表面(噪聲過多)
- 反光或光亮區域(在不同光照角度下不一致)
- 在有缺陷部件上可能損壞或缺失的特徵
- 可能被碎屑遮蔽的非常小的細節
黃金法則:小而遠離
在部件上放置 2–3 個儘可能遠離的小型模板區域——例如,一個在左上角,另一個在右下角。這是實現穩定對齊的最重要提示。單側的單個區域會產生角度抖動(對齊"晃動"0.5°或更多)。兩側相對的區域可以平均掉此誤差,將抖動降低一個數量級(降至約 0.05°)。
您不需要大的區域。一個捕獲銳利角部或幾個乾淨孔的小矩形,遠勝於一個包含嘈雜背景的大型區域。
第三步:理解邊緣高亮和紅點
放置模板區域後,對齊器會立即分析其中的邊緣。您將在影象上看到疊加的彩色高亮:
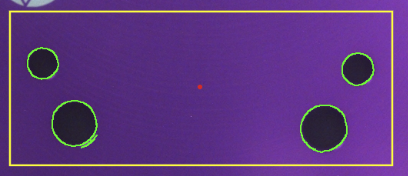
綠色高亮
功能周圍的綠色輪廓表示對齊器在該區域檢測到了強烈、可用的邊緣。這些是系統用於查詢和跟蹤您的零件的模式。在穩定一致的特徵上看到的綠色越多,對齊效果就越好。
紅點
您在模板區域中心(或影象中心附近)看到的小紅點是對齊參考點——也稱為錨點或對齊中心。這是對齊器用作計算位置和旋轉偏移量的原點的數學中心。
當對齊器在新影象中找到您的零件時,它會計算零件的檢測位置相對於這個紅點偏移了多遠。然後,所有 ROI 位置都會按相同的偏移量進行調整。可以將紅點視為整個對齊變換的"樞軸點"。
您無需手動調整紅點。它會根據您的模板區域自動計算。在零件上分佈多個模板區域可為系統提供更穩定、更準確的參考點。
紅色高亮(問題指示器)
如果整個模板區域顯示紅色高亮而非綠色,則表示對齊器無法在該區域中找到足夠的可用邊緣。這是一個問題——意味著該區域未對對齊做出貢獻。要解決此問題:
- 提高靈敏度滑塊(參見第 5 步)
- 將區域移動到邊緣更清晰、更銳利的位置
- 改善光照以增加零件特徵的對比度
- 檢查相機對焦——模糊的邊緣無法被可靠檢測到
第 4 步:使用忽略模板區域工具清除噪聲
即使放置得當的區域也可能捕獲不需要的邊緣——反光、紋理、碎屑或背景圖案。忽略模板區域工具允許您在這些噪聲區域上塗抹,將它們從對齊模式中擦除。
- 在模板區域面板中點選忽略模板區域
- 筆刷工具將被啟用——在您想要移除的任何邊緣上塗抹
- 塗抹的區域會轉變為一個蒙版,永久將這些邊緣從對齊模式中排除
![]()
為什麼這很重要
忽略工具是對齊器配置中最容易被忽視但最重要的步驟之一。原因在於:模板中每個不需要的邊緣都是對齊器試圖匹配的噪聲。如果該噪聲在下一個零件上不存在(因為它是反光或隨機劃痕),對齊器的置信度就會下降,或者更糟,它會匹配到錯誤的位置。
使用高靈敏度 + 積極清理策略:將靈敏度滑塊調高以檢測更多邊緣,然後果斷地使用忽略工具移除每一個不是乾淨、可重複零件特徵的邊緣。這讓您獲得兩全其美的效果——您捕獲細微但重要的邊緣,同時過濾掉所有噪聲。
常見的應忽略物件:
- 亮斑或眩光反射
- 零件周圍可見的背景紋理
- 零件本身的表面紋理(拉絲金屬、模製圖案)
- 碎屑、油漬或汙染物的邊緣
- 零件間不同的標籤、貼紙或標記的邊緣
第五步:調整靈敏度
靈敏度滑塊控制邊緣檢測演算法的積極程度。數值越高,檢測到的邊緣越多(包括細微的邊緣);數值越低,僅識別最強、最明顯的邊緣。

如何找到合適的設定:
- 從預設靈敏度開始
- 如果您的模板區域顯示紅色高亮(邊緣不足),請提高靈敏度
- 如果您在紋理和無關特徵上看到過多的綠色噪聲,請降低靈敏度
- 理想的設定是仍能在您關心的特徵上產生穩定綠色高亮的最低靈敏度
靈敏度並非越高越好。邊緣越多,潛在噪聲也越多。最佳方法是:提高靈敏度以捕獲所需的邊緣,然後使用 Ignore 工具移除所有不需要的部分。這樣可以獲得清晰、可靠的模式。
第六步:設定旋轉範圍
旋轉範圍定義了對齊器在搜尋零件時能容忍的旋轉變化量。
- +/- 180 度 — 在任意旋轉角度下查詢零件(最大靈活性)。適用於傳送帶上的零件或方向不可預測的機器人抓取系統。
- +/- 5–20 度 — 適用於大致定位但可能存在小幅旋轉變化的零件。常見於有一定活動量的夾具設定。
- +/- 0 度 — 僅匹配與模板完全相同角度的零件。處理速度最快。
將旋轉範圍用作質量門檻。 如果您將範圍設定為 ±10°,而到達的零件旋轉了 15°,對齊器將無法找到它——您可以將此失敗用作剔除訊號。這是在 AI 執行之前捕獲錯誤放置零件的一種有效方式。
一個常見錯誤是在零件實際可能以任意角度到達時,仍保留預設的 ±20° 旋轉範圍。如果您的零件可以自由旋轉(例如在振動料斗或無導軌傳送帶上),請將其設定為 ±180°。否則,對齊器將對任何旋轉超過 ±20° 的零件失敗,您將花費數小時除錯看似隨機的對齊失敗問題。
處理速度權衡: 更寬的旋轉範圍意味著對齊器必須搜尋更多方向,這需要更長時間。對於高速檢測,請使用能覆蓋實際零件變化的最窄範圍。
第七步:設定置信度閾值
置信度閾值是對齊器在接受檢測為有效之前所需的最低匹配質量。

- 範圍: 0.0 至 1.0(百分比越低 = 匹配越嚴格,1% 表示完全相同的匹配)
- 推薦值: 大多數應用為 0.6 – 0.9
置信度工作原理:
對齊器計算模板中的邊緣模式與新影象中找到的邊緣之間的相關性得分。該得分考慮了模式相似性、空間精度和邊緣質量。如果得分超過您的閾值,則接受對齊。否則,將被標記為失敗。
調整指南:
| 症狀 | 操作 |
|---|---|
| 對齊器匹配到錯誤的物件或背景 | 提高閾值(嘗試 0.85–0.95) |
| 有效零件未被檢測到 | 降低閾值(嘗試 0.60–0.70) |
| 大多數零件對齊成功但少數失敗 | 檢查失敗零件是否有被遮擋的特徵,然後進行調整 |
第 8 步:啟用尺度不變(按需)
尺度不變 開關允許對齊器檢測比模板略大或略小的零件——可處理 ±10% 的尺寸變化。這可補償零件距離相機稍近或稍遠的情況。
在以下情況下啟用尺度不變:
- 零件位於輸送帶上,可能偏高或偏低
- 零件由機器人呈現,無法保證精確的 Z 軸高度
- 夾具在垂直軸上存在間隙
- 零件厚度變化並影響影象中的視覺尺寸
在以下情況下保持禁用:
- 零件距離相機的距離一致
- 您希望獲得最快的對齊速度(尺度搜尋會增加處理時間)
- 尺寸變化實際上表示存在問題(零件錯誤)
第 9 步:儲存並使用實時預覽進行測試
配置好模板區域和設定後:
- 點選設定面板底部的 儲存。這將訓練並部署對齊器模型。
- 切換 實時預覽模式(頁面頂部的 "Live" 按鈕)。
- 預覽窗格從靜態模板切換為實時相機畫面,並實時應用對齊。
驗證清單
在實時預覽啟用的情況下,對對齊進行實際測試:
- 將零件向左、右、上、下移動 —— ROI 應平滑跟隨
- 在指定範圍內旋轉零件 —— ROI 應隨之旋轉
- 嘗試旋轉範圍的邊緣 —— 在 ±最大旋轉處會發生什麼?
- 呈現不同的(但有效的)零件 —— 對齊是否仍然保持?
- 嘗試破壞它 —— 將零件放置在極端位置、部分遮擋特徵、在模板區域附近新增雜物
在繼續之前,始終嘗試破壞對齊。 如果對齊脆弱,它將在生產中不可預測地失敗。花 2–3 分鐘主動嘗試製造失敗。如果它能透過您的測試,則已準備好投入生產。如果不能,請立即修復——不要繼續進行 ROI 配置和 AI 訓練,否則當對齊問題後續暴露時,您將不得不重做所有工作(瀑布效應)。
技巧與竅門
對齊到永不變化的邊緣
最常見的對齊器錯誤是將模板區域放置在零件之間會變化的特徵上。即使是微小的差異——標籤位置稍有不同、螺絲角度不同、焊點存在差異——都會降低對齊置信度或導致抖動。
最佳的對齊特徵:
- 機加工邊緣、銑削槽、鑽孔
- PCB 板輪廓、安裝孔
- 公差嚴格的模製特徵(肋、凸臺)
- 衝壓件輪廓或鐳射切割邊緣
策略性地使用多個區域
兩個位置恰當的區域勝過五個位置不佳的區域。理想的設定:
- 區域 1: 零件的左上角(或頂部)—— 清晰的角或孔
- 區域 2: 零件的右下角(或底部)—— 不同的顯著特徵
這種三角定位以最大基線距離為對齊器提供位置和旋轉資料,最大限度地減少角度誤差。
當對齊器找不到零件時
如果對齊持續失敗:
- 檢查實時預覽中的置信度值 —— 它接近您的閾值還是接近零?
- 如果接近零:您的模板區域沒有可用特徵 —— 重新設計它們
- 如果接近閾值:略微降低閾值,或使用忽略工具清理噪聲邊緣
- 如果某些零件可以但其他零件不行:變化的零件可能在您放置模板區域的位置存在特徵遮擋或缺失
速度最佳化
對於毫秒至關重要的高吞吐量應用:
- 使用2個區域(而非4個或更多),邊緣要清晰
- 設定能覆蓋實際變化的最窄旋轉範圍
- 將靈敏度設為能產生穩定綠色邊緣的最低值
- 如果Z距離不變,禁用尺度不變
- 保持模板區域較小——大區域意味著需要處理更多邊緣
從上游變更中恢復
如果您更改以下任何項,必須重新進行對齊器設定:
| 所做更改 | 需要重做的內容 |
|---|---|
| 鏡頭畸變校正 | 重新捕獲模板,重做所有區域 |
| 相機鏡頭或焦距 | 重新捕獲模板,重做所有區域 |
| 相機安裝位置 | 重新捕獲模板,可能需要重做區域 |
| 照明配置 | 重新捕獲模板,驗證邊緣仍可檢測 |
| 影象曝光/增益設定 | 重新捕獲模板,驗證邊緣仍可檢測 |
何時跳過對齊器
並非每個應用都需要對齊。在以下情況下禁用對齊器(勾選"Skip Aligner"):
- 部件位於精密夾具中,可保證位置在1–2畫素內
- 部件經過機械定位,無任何間隙
- 您需要最大處理速度,且位置變化可忽略不計
- 您正在使用具有位置不變屬性的分割器來處理3D部件變化
當跳過對齊器時,ROI將保持在模板影象上的固定位置。系統完全跳過對齊計算,速度更快,但要求部件呈現方式完全一致。
快速參考:對齊器設定
| 設定 | 用途 | 推薦範圍 | 何時調整 |
|---|---|---|---|
| 靈敏度 | 邊緣檢測的強度 | 能產生綠色邊緣的最低值 | 區域中出現紅色高亮 → 增加 |
| 旋轉範圍 | 最大旋轉容差(±度數) | 匹配實際部件變化 | 部件以意外角度到達 |
| 置信度閾值 | 有效對齊所需的最低匹配質量 | 0.6 – 0.9 | 錯誤匹配 → 增加;漏檢部件 → 降低 |
| 尺度不變 | 允許±10%的尺寸變化 | 僅在Z距離變化時啟用 | 部件相機距離不同 |
故障排除快速參考
| 問題 | 可能原因 | 解決方法 |
|---|---|---|
| ROI完全不移動 | 啟用了Skip Aligner,或不存在模板區域 | 禁用Skip Aligner;新增模板區域 |
| 置信度始終接近0% | 模板區域沒有可用邊緣 | 將區域移動到具有強且清晰邊緣的位置 |
| 對齊抖動/搖擺 | 單個區域或區域放置得過於靠近 | 在部件相對兩側遠距離新增區域 |
| 匹配到錯誤物件 | 圖案不夠獨特,閾值過低 | 新增更多具有獨特特徵的區域;提高閾值 |
| 對某些部件有效,對其他部件失敗 | 模板區域位於可變特徵上 | 將區域移動到所有部件都具有的特徵上 |
| 對齊速度慢 | 區域過多、旋轉範圍過寬、尺度不變已開啟 | 減少至2個區域,縮小旋轉範圍,如不需要則禁用尺度不變 |
相關文章: