AI 驅動文件
您想了解什麼?
RS-232 通訊設定
本頁介紹如何使用 Node-RED 和串列埠轉換器在 OV80i 攝像頭與外部裝置之間建立 RS-232 通訊。
通訊概覽
攝像頭可以使用 Node-RED 和串列埠轉換器透過 RS232 與其他裝置通訊。
系統要求:
- RS485 轉 RS232 串列埠轉換器(需購買硬體)
- Node-RED 配置
- 帶 RS232 埠的外部裝置
所需硬體
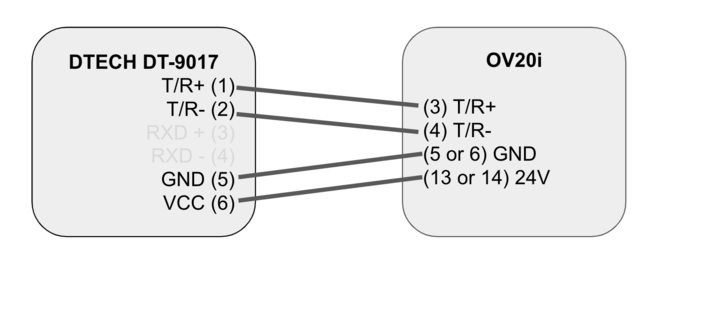
您需要購買一個 RS485 轉 RS232 串列埠轉換器。我們推薦使用 DTECH DT-9017。該裝置可將來自攝像頭的 RS485 訊號轉換為 RS232。
硬體規格:
- 轉換器型別: RS485 轉 RS232 串列埠轉換器
- 推薦型號: DTECH DT-9017
- 功能: 將攝像頭的 RS485 訊號轉換為 RS232 格式
- 來源: 需第三方購買
物理連線設定
第一步:將串列埠轉換器連線到攝像頭
按照下圖所示將串列埠轉換器連線到攝像頭。
第二步:建立與 RS232 埠的連線
將串列埠轉換器的另一端連線到所需的 RS232 埠。這樣即完成了攝像頭與 RS232 埠之間的物理連線。
連線鏈路: OV80i 攝像頭 → RS485 輸出 → 串列埠轉換器 → RS232 埠 → 外部裝置
配置 Node-RED 邏輯
導航至 IO模組 配置 Node-RED 邏輯。按照 Node-RED 基礎部分中提供的步驟匯入下方提供的 JSON 檔案:
配置步驟:
- 在攝像頭介面中訪問 IO模組
- 開啟 Node-RED 配置
- 匯入提供的 JSON 配置檔案
- 部署更新後的流程
Node-RED 配置 JSON
複製並匯入以下 JSON 配置以設定 RS-232 通訊:
[
{
"id": "7cb1ab03670cd840",
"type": "tab",
"label": "Flow 1",
"disabled": false,
"info": "",
"env": []
},
{
"id": "8aabc4c53d9cca67",
"type": "ui_group",
"name": "Home",
"tab": "51b1608995f5ea89",
"order": 1,
"disp": true,
"width": "27",
"collapse": false
},
{
"id": "51b1608995f5ea89",
"type": "ui_tab",
"name": "Home",
"icon": "dashboard",
"disabled": false,
"hidden": false
},
{
"id": "42dd086612a76167",
"type": "ui_base",
"theme": {
"name": "theme-light",
"lightTheme": {
"default": "#0094CE",
"baseColor": "#0094CE",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif",
"edited": false
},
"darkTheme": {
"default": "#097479",
"baseColor": "#097479",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif",
"edited": false
},
"customTheme": {
"name": "Untitled Theme 1",
"default": "#4B7930",
"baseColor": "#4B7930",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif"
},
"themeState": {
"base-color": {
"default": "#0094CE",
"value": "#0094CE",
"edited": false
},
"page-titlebar-backgroundColor": {
"value": "#0094CE",
"edited": false
},
"page-backgroundColor": {
"value": "#fafafa",
"edited": false
},
"page-sidebar-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"group-textColor": {
"value": "#1bbfff",
"edited": false
},
"group-borderColor": {
"value": "#ffffff",
"edited": false
},
"group-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"widget-textColor": {
"value": "#111111",
"edited": false
},
"widget-backgroundColor": {
"value": "#0094ce",
"edited": false
},
"widget-borderColor": {
"value": "#ffffff",
"edited": false
},
"base-font": {
"value": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif"
}
},
"angularTheme": {
"primary": "indigo",
"accents": "blue",
"warn": "red",
"background": "grey",
"palette": "light"
}
},
"site": {
"name": "Node-RED Dashboard",
"hideToolbar": "false",
"allowSwipe": "false",
"lockMenu": "false",
"allowTempTheme": "true",
"dateFormat": "DD/MM/YYYY",
"sizes": {
"sx": 48,
"sy": 48,
"gx": 6,
"gy": 6,
"cx": 6,
"cy": 6,
"px": 0,
"py": 0
}
}
},
{
"id": "c47cc2d81c408a36",
"type": "serial-port",
"name": "",
"serialport": "/dev/ttyTHS1",
"serialbaud": "9600",
"databits": "8",
"parity": "none",
"stopbits": "1",
"waitfor": "",
"dtr": "high",
"rts": "low",
"cts": "high",
"dsr": "high",
"newline": "\\\\n",
"bin": "false",
"out": "char",
"addchar": "\\\\n",
"responsetimeout": "10000"
},
{
"id": "2baab5bd0cce1230",
"type": "debug",
"z": "7cb1ab03670cd840",
"name": "debug 1",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 580,
"y": 580,
"wires": []
},
{
"id": "4e7d748dce95e6c6",
"type": "change",
"z": "7cb1ab03670cd840",
"name": "set rts high",
"rules": [
{
"p": "payload",
"t": "set",
"pt": "msg",
"to": "{\\"rts\\": \\"high\\"}",
"tot": "json"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 630,
"y": 400,
"wires": [
[
"8e62d87d6be5a946"
]
]
},
{
"id": "e3b7598d774c2bd6",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "delay",
"timeout": "20",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 630,
"y": 320,
"wires": [
[
"270a4fa8fb4a4978",
"5325a871a1f84955"
]
]
},
{
"id": "104dae3badcde04b",
"type": "change",
"z": "7cb1ab03670cd840",
"name": "set rts low",
"rules": [
{
"p": "payload",
"t": "set",
"pt": "msg",
"to": "{\\"rts\\": \\"low\\"}",
"tot": "json"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 630,
"y": 360,
"wires": [
[
"8e62d87d6be5a946"
]
]
},
{
"id": "651284218146186a",
"type": "inject",
"z": "7cb1ab03670cd840",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "GOOD",
"payloadType": "str",
"x": 250,
"y": 360,
"wires": [
[
"342f2ea893daee9b"
]
]
},
{
"id": "270a4fa8fb4a4978",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "delay",
"timeout": "20",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 830,
"y": 360,
"wires": [
[
"104dae3badcde04b"
]
]
},
{
"id": "17d922879e91c8a7",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "rate",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "0.5",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": true,
"allowrate": false,
"outputs": 1,
"x": 420,
"y": 580,
"wires": [
[
"2baab5bd0cce1230"
]
]
},
{
"id": "342f2ea893daee9b",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "rate",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "0.5",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": true,
"allowrate": false,
"outputs": 1,
"x": 430,
"y": 320,
"wires": [
[
"e3b7598d774c2bd6",
"4e7d748dce95e6c6"
]
]
},
{
"id": "54165e10b820a5f5",
"type": "inject",
"z": "7cb1ab03670cd840",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "FAIL",
"payloadType": "str",
"x": 250,
"y": 300,
"wires": [
[
"342f2ea893daee9b"
]
]
},
{
"id": "2549782ab378b378",
"type": "serial in",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 260,
"y": 580,
"wires": [
[
"17d922879e91c8a7"
]
]
},
{
"id": "5325a871a1f84955",
"type": "serial out",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 820,
"y": 320,
"wires": []
},
{
"id": "8e62d87d6be5a946",
"type": "serial control",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 830,
"y": 400,
"wires": [
[]
]
},
{
"id": "263de9e9ed71a09e",
"type": "comment",
"z": "7cb1ab03670cd840",
"name": "Send any string here to pass it to the selected serial port. The rest of the nodes just manage information flow.",
"info": "",
"x": 550,
"y": 240,
"wires": []
},
{
"id": "15d30e67047b53fc",
"type": "comment",
"z": "7cb1ab03670cd840",
"name": "Receive strings here.",
"info": "",
"x": 280,
"y": 520,
"wires": []
}
]
- 埠:
/dev/ttyTHS1 - 波特率: 9600
- 資料位: 8
- 校驗位: 無
- 停止位: 1
- 流控制: 由流程邏輯管理的 RTS/CTS
設定通訊
傳送資料
使用 FAIL/GOOD 節點透過 RS232 埠將相機結果傳送到接收裝置。
資料傳輸:
- 來源: 相機檢測結果
- 方式: FAIL/GOOD 節點輸出
- 目標: 透過 RS232 連線的外部裝置
- 內容: 透過/失敗狀態和檢測資料
接收資料
使用 debug 節點從 RS232 埠接收資料,並將其整合到您的系統邏輯中。
資料接收:
- 來源: 透過 RS232 埠連線的外部裝置
- 方式: 使用 debug 節點進行監控
- 整合: 整合到 Node-RED 邏輯中
- 用途: 系統控制與反饋
✅ 設定完成
按照以上步驟操作,您將成功建立相機與 RS232 埠之間的通訊。
驗證清單:
- ✅ 序列轉換器已正確連線到相機
- ✅ RS232 埠連線已建立
- ✅ Node-RED 邏輯已配置並部署
- ✅ 資料傳輸已測試(相機到外部裝置)
- ✅ 資料接收已驗證(外部裝置到相機)
自動生成序列通訊流程
Integration Builder 可以根據簡單的英文描述生成用於 RS-232 通訊的 Node-RED 流程。描述您的需求(例如,"透過 RS-232 將透過/失敗結果傳送到外部控制器"),即可在數秒內獲得可投入生產的流程。