AI 驅動文件
您想了解什麼?
建立您的第一個程式 (OV80i)
這是您的相機變身為 AI 檢測員的地方。程式是一個完整的包(影象設定、對齊、感興趣區域 (ROI)、AI 模型和輸出規則),針對一個特定的檢測任務捆綁在一起。
您可以在一臺相機上擁有任意數量的程式。每個程式都可以儲存、備份、傳輸到其他相機,並進行版本控制。
開始之前:記住瀑布原則
本節中的所有內容都遵循瀑布原則。您將按順序經過六個步驟。不要跳過。 在進入下一步之前,驗證每一步都能正常執行。
影象設定
曝光、增益、光照
模板與對齊器
捕獲、對齊
感興趣區域 (ROI)
繪製 ROI
AI 訓練
標註、訓練
輸出規則
透過/失敗、IO
部署!
啟用、驗證
建立新程式
- 在左側邊欄中轉到 All Recipes(這也是開啟相機時的著陸頁面)
- 點選 + New
- 為其命名(例如 "Surface Defect Inspection")
- 選擇程式型別:Segmentation 或 Classification(如下所述)
你希望此配方做什麼?
每個 OV80i 配方使用一種模型型別。根據你需要回答的問題進行選擇。你以後可以更改。
判定每個零件或每個感興趣區域 (ROI) 屬於哪個類別。
最適合: 判定結果和已知類別,答案是每個區域一個標籤的場景。
在畫素級別查詢並勾勒特徵、缺陷或區域。
最適合: 定位、測量或計數那些形狀和位置很重要的特徵。
60 秒瞭解分類
閱讀《瞭解分類器》 →分類器檢視你繪製的每個區域,並從你定義的列表中為其分配一個標籤。模型為每個 ROI 返回一個判定結果:該區域為"合格"、"缺失"或"劃傷"。大多數 OV80i 配方都從這裡開始。
示例:缺失緊韌體
在四個螺釘位置上設定四個 ROI。兩個類別:存在和缺失。模型為每個 ROI 返回一個標籤。
示例:表面合格 / 不合格
在面板表面上設定一個 ROI。兩個類別:乾淨和有瑕疵。模型為該面板返回一個標籤。
想要並排對比?請參閱 Classifier vs. Segmenter。想要深入瞭解任一模型型別?閱讀 Understanding Classifier 瞭解判定與標籤,或閱讀 Understanding Segmenter 瞭解畫素級蒙版、計數與測量。 5. 點選 Activate 進入程式編輯器
![]()
OV80i 支援多模型程式。您可以在單個程式中組合分類器和分割器以實現全面檢測。例如,使用分類器檢查零件是否存在,使用分割器檢測表面缺陷,全部整合在一個程式中。
不確定該選擇哪一個?請參閱 Classifier vs. Segmenter 或在 tools.overview.ai 詢問 AI 助手。
OV80i 支援多模型程式,允許您在單個程式中組合分類器和分割器以實現全面檢測。例如,使用分類器驗證零件是否存在,使用分割器檢測表面劃痕,全部基於同一次捕獲執行。
現在遵循以下六個步驟:
第一步:影象設定
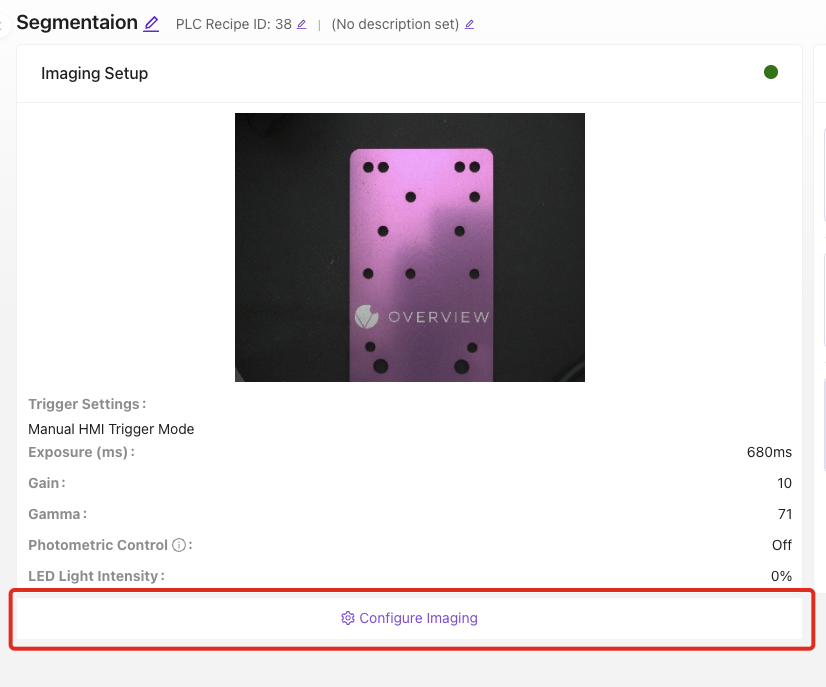
讓您的相機影象看起來清晰且一致。調整曝光、增益、白平衡,關鍵是,如果您使用廣角鏡頭,請啟用鏡頭畸變校正。
關鍵設定:
- Exposure(曝光): 感測器捕獲光線的時長。值越高 = 越亮但運動模糊越嚴重
- Gain(增益): 數字亮度提升。值越高 = 越亮但噪聲越多
- Lens Correction(鏡頭校正): 修正廣角鏡頭的桶形畸變。**如適用請立即啟用。**不要跳過此步驟
- 外部照明: 在繼續之前,請驗證您的照明是否均勻且一致
繼續之前請驗證: 點選 Live Preview。影象應清晰、光線充足,且每次拍攝都保持一致。
第二步:模板影象與對齊
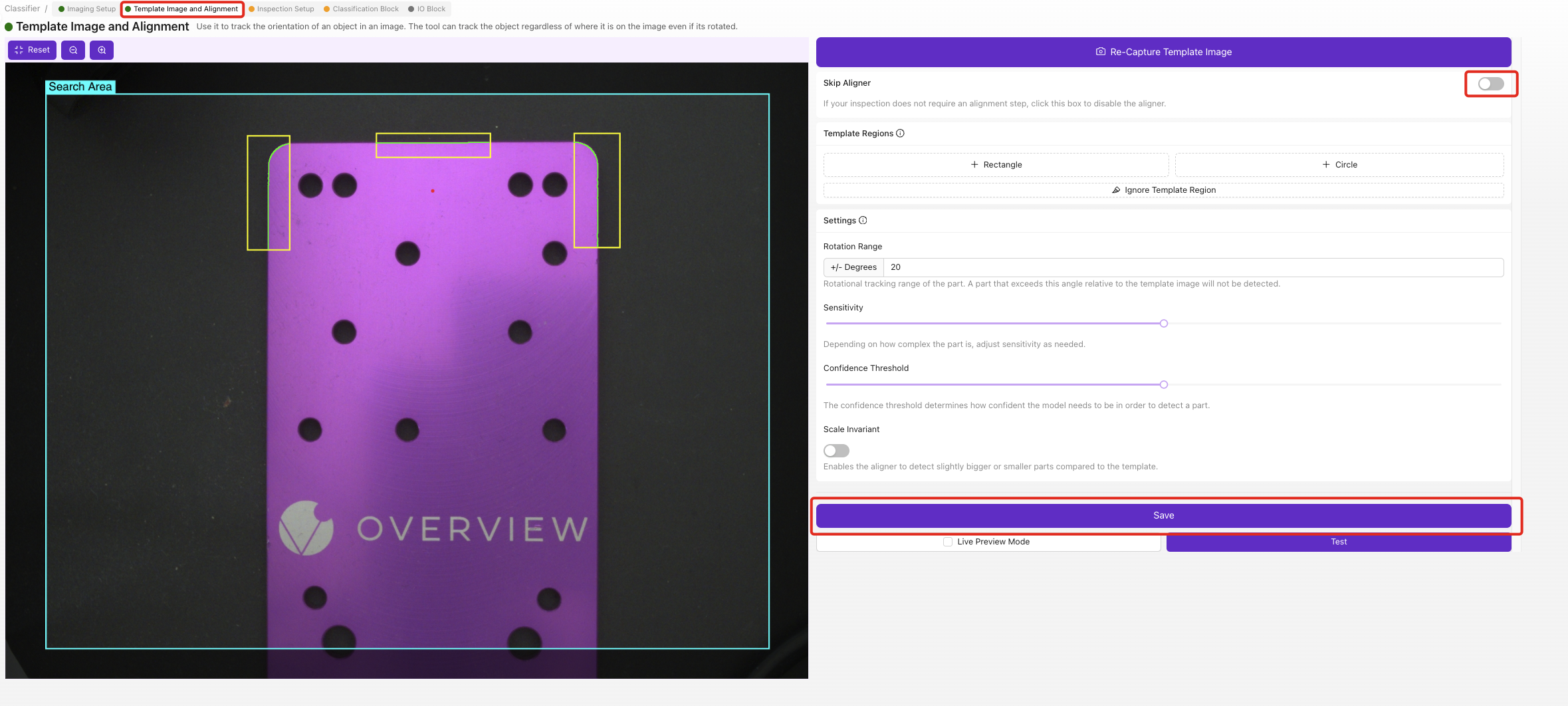
這是大多數客戶感到最具挑戰性的步驟,也是影響最大的步驟。對齊器是整個檢測的基礎。它動態地移動您的檢測框,以跟蹤零件在傳送帶上發生的位移和旋轉。良好的對齊讓您可以繪製更小的 ROI,這意味著更少的訓練資料和更準確的 AI。對齊器 → ROI → 分類器/分割器:如果第一個環節薄弱,下游的一切都會失效。
簡要說明:
- 捕獲良品零件的模板影象
- 在永不改變的特徵(明顯的邊緣、角、孔)上放置 2-3 個小型模板區域
- 在零件上將它們放置得儘可能遠
- 使用 Ignore 工具清理嘈雜的邊緣
- 儲存,然後使用 Live Preview 測試。移動零件並驗證對齊是否能跟蹤它
切勿將對齊器錨定在缺陷、標籤、貼紙或任何可能獨立於零件移動的物體上。僅對齊到永久性、剛性的特徵(機加工邊緣、鑽孔、PCB 輪廓)。如果您將對齊器錨定在條形碼貼紙上,而有人將其貼歪,相機就會將您所有的檢測框移到錯誤的位置。
親自嘗試: 使用下面的模擬器檢視零件在傳送帶上發生位移時會發生什麼。關閉對齊器,然後移動滑塊觀察檢測框如何失去跟蹤。
相機設定
模擬真實環境
移動生產線上的零件。
Legend
**閱讀 對齊詳解 以獲取完整的演練。**這是本文件中最重要的頁面。
第三步:感興趣區域 (ROIs)
現在繪製 AI 實際進行檢測的區域。這些就是您的感興趣區域 (ROIs)。
關鍵規則:儘可能保持 ROI 小。 這是客戶問題的第二大來源。閱讀 為什麼 ROI 大小很重要 以瞭解原因。
簡短版本:
- 建立一個檢測型別(例如 "Surface Quality"),並定義預期的類別(例如 "good"、"defective")
- 在每個需要檢測的位置繪製矩形 ROI
- 讓它們剛好足夠包含特徵,不要更大
- 用描述性的名稱命名(例如 "Surface_Center")
第四步:訓練您的 AI 模型
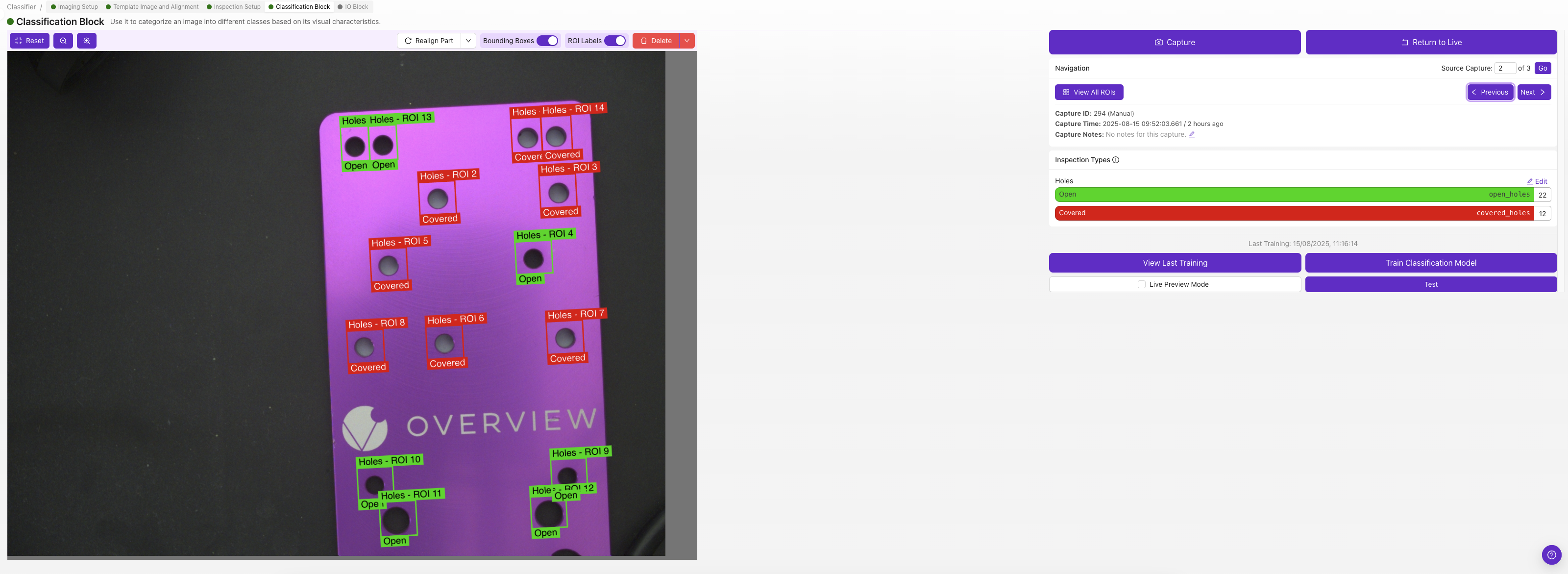
標註少量影象並訓練您的第一個模型。
簡短版本:
- 從每個類別 10-15 張影象開始。不要過度收集
- 訓練前仔細檢查每個標籤(一個錯誤標籤就可能毀掉您的模型)
- 訓練(約 30 秒)以檢查訊號
- 使用實時預覽進行測試。嘗試找出問題
- 在失敗的地方新增針對性資料,然後重新訓練
第五步:輸出規則 (IO模組)
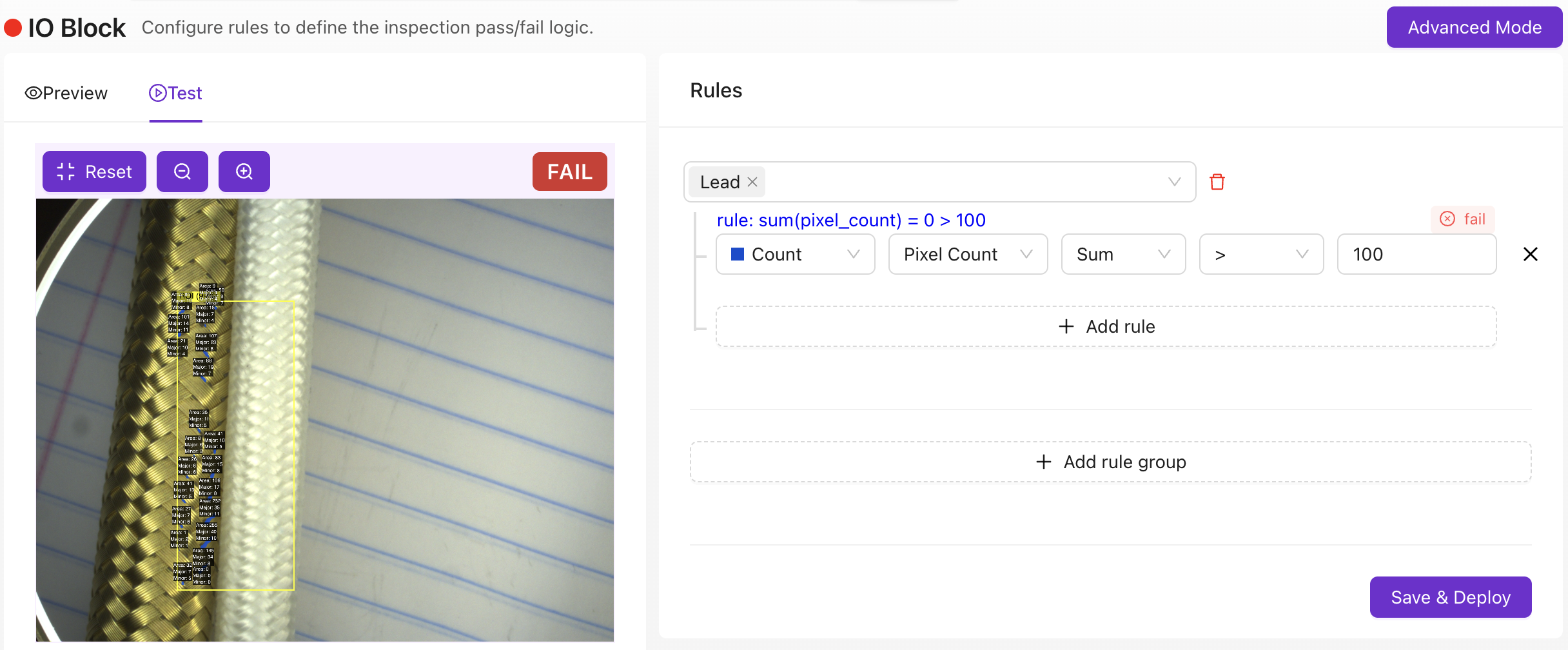
定義當 AI 做出決策時會發生什麼。
基本模式: 設定透過/失敗的規則。最簡單的設定:所有 ROI 必須透過才算全域性透過。該單一二進位制結果會傳送到您的 PLC、HMI 或輸出。
高階模式 (Node-RED): 適用於超出簡單透過/失敗的任何場景:自定義儀表板、時間序列邏輯、資料路由到 MES 系統、條碼掃描器整合(需要外部讀取器)等。使用 tools.overview.ai 從純英文描述生成 Node-RED 流程。
第六步:部署與驗證

- 啟用您的程式
- 設定觸發模式(手動、硬體感測器、PLC 或間隔)
- 在系統中執行測試零件
- 驗證透過/失敗輸出是否符合您的預期
- 檢查邊緣情況,即最難分類的零件
恭喜!您現在已經擁有一個執行中的 AI 檢測系統。
程式檢查清單
在繼續之前,請確認:
- 已建立並命名新程式
- 影象設定已配置:清晰、光照良好、一致
- 對齊已設定並可靠跟蹤
- 感興趣區域 (ROIs) 已繪製:小巧、位置合適、已命名
- AI 模型已訓練並透過實時預覽測試
- 輸出規則已配置:透過/失敗符合預期
- 程式已使用正確的觸發模式啟用並部署