AI 驅動文件
您想了解什麼?
分類器 vs. 分割器
這是建立程式時最常見的問題。以下是清晰的判斷框架。
分類器
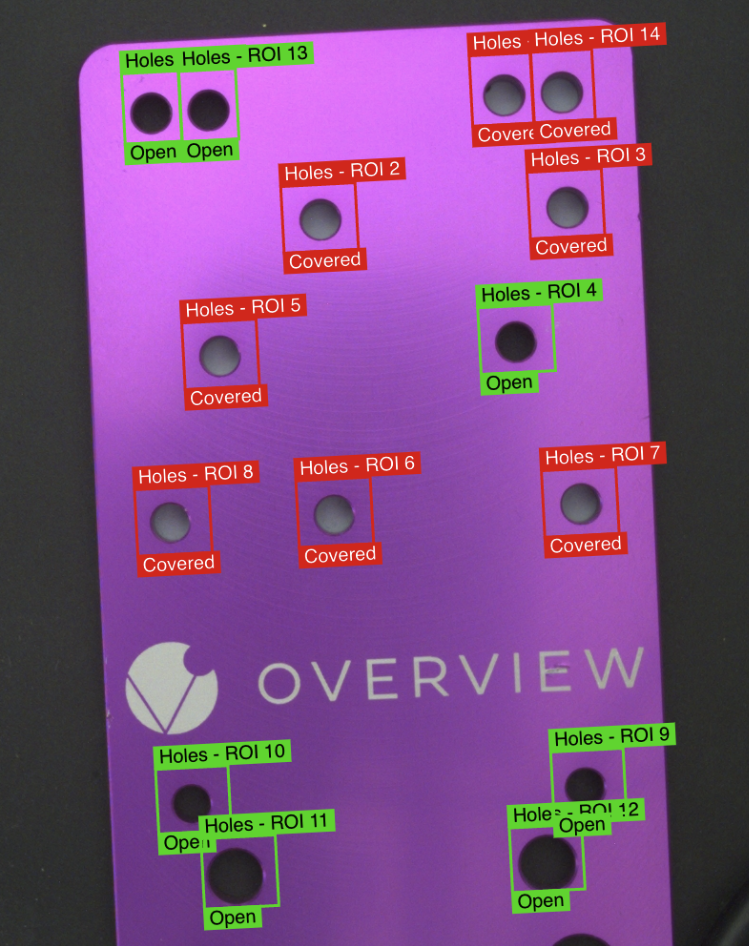
分類器檢視每個 ROI 裁剪區域,並將其歸入某個類別:透過、失敗、存在、缺失、劃傷、良好,或您定義的任何類別。
可以把它想象成將卡片分入不同堆。 AI 檢視整個裁剪影象並判斷"這個歸入透過堆"或"這個歸入失敗堆"。
何時使用分類器:
- 您需要透過/失敗或多類判定
- 您的 ROI 足夠小,能清晰顯示缺陷
- 標籤速度很重要(分類器標註速度快得多)
- 您要檢查特徵的存在/缺失
- 示例:螺釘存在/缺失、聯結器已就位/未就位、標籤正確/錯誤
如需結合互動式實驗場進行更深入的講解,請閱讀 理解分類器。
使用 Defect Creator Studio 為任一方案生成逼真的合成缺陷影象 — 用簡單的英語描述缺陷,即可在數秒內獲得可用於訓練的影象。
訓練模式
分類提供兩種不同的訓練方式:
Fast Classifier
- 目的: 快速搭建與測試
- 使用場景: 快速原型開發與概念驗證
- 速度: 訓練時間較短
- 精度: 較低
- 生產就緒: 不建議用於生產
Accurate/Production Classifier
- 目的: 生產就緒的檢測
- 使用場景: 最終部署與製造
- 速度: 訓練時間較長
- 精度: 較高
- 生產就緒: 主要訓練模型,可獲得最佳結果
來自生產現場的分類示例
鬆動螺母檢測(OEM 裝配)
任務: 識別機械裝配中鬆動的螺母
設定:
- ROI: 圍繞螺母區域的矩形
- Classes:
- Good - 正確擰緊的螺母(Pass 100%)
- Defect - 鬆動的螺母(Fail 98%)

結果: 二元判定 — 螺母是否正確就位或鬆動
軸就位驗證(OEM 裝配)
任務: 識別部分就位的軸
設定:
- ROI: 覆蓋軸安裝區域的矩形
- Classes:
- Good - 完全就位的軸
- Defect - 部分就位的軸
- Defect - 完全脫出的軸
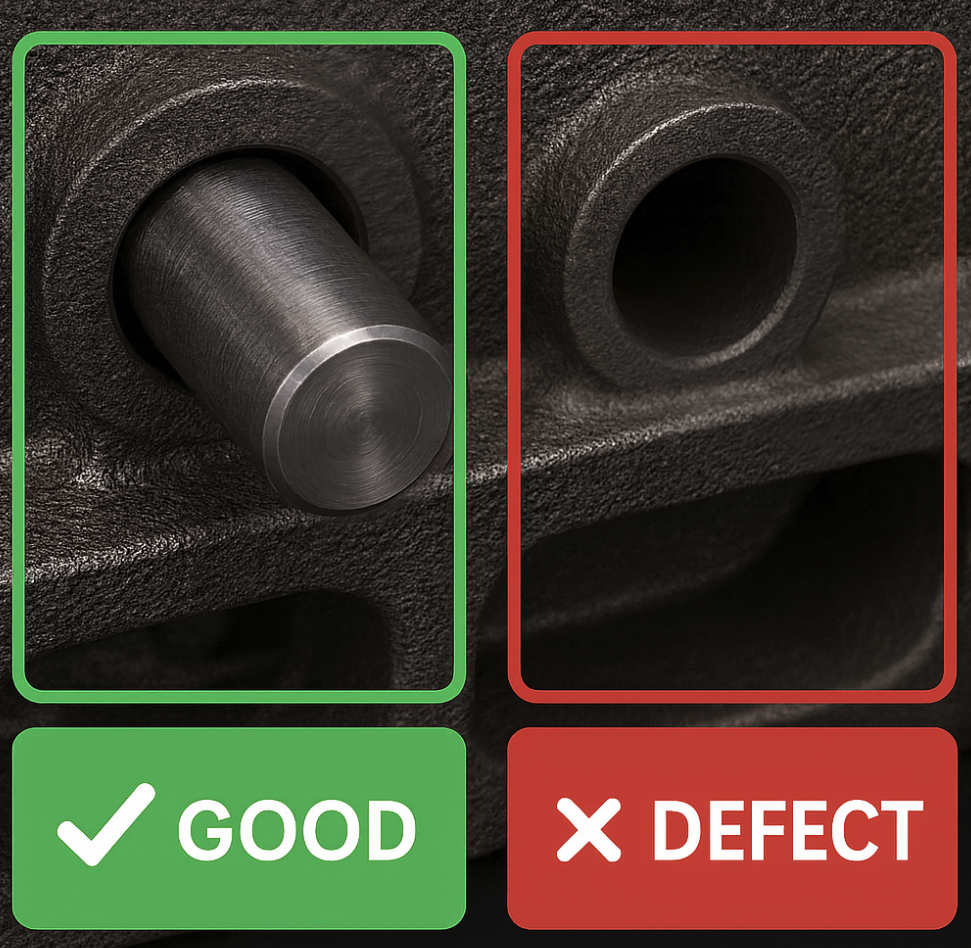
結果: 部件被歸類為正確安裝或有缺陷
散熱器翅片檢測(一級供應商加工)
任務: 檢查每個散熱器翅片是否有凹陷
設定:
- ROI: 覆蓋散熱器翅片陣列的矩形
- Classes:
- Good - 未損壞的翅片(Straight)
- Defect - 彎曲/損壞的翅片(Bent)

結果: 分類器區分良好翅片與不良翅片
分割器
分割器在畫素級別檢查每個 ROI 裁剪圖,並精確識別哪些畫素屬於缺陷。
可以將其視為用記號筆進行高亮標註。 AI 會精確圈出缺陷所在的位置,而不僅僅是判斷是否存在缺陷。
在以下情況使用分割器:
- 您需要畫素級的缺陷定位(劃痕究竟在哪裡?)
- 您需要測量缺陷的尺寸或面積
- 您的 ROI 需要較大,但您要查詢的是小缺陷
- 您需要在一個區域中統計多個缺陷
- 示例:表面劃痕、汙漬、裂紋、焊接質量、尺寸測量
分割器只會學習它所看到的缺陷的尺寸和紋理。如果您用小顆粒汙染物訓練它,當生產線上出現同類大塊缺陷時,可能只有邊緣或零散區域被高亮——缺陷的主體部分將不會被遮罩標記。解決方法是在訓練樣本中涵蓋您預期出現的全部缺陷尺寸範圍。沒有大尺寸缺陷樣本?可以使用 Defect Creator Studio 生成合成樣本。
如需結合互動式 playground 進行更深入的講解,請閱讀 Understanding Segmenter。
訓練模式
分割使用單一訓練模式:
Accurate/Production Only
- 目的: 可用於生產的畫素級分析
- 訓練: 單一的高準確度模式
- 速度: 較長的訓練時間以實現精確的畫素分類
- 準確度: 用於細緻缺陷對映的高精度
- 生產就緒: 針對製造環境進行了最佳化
來自生產的分割示例
表面缺陷檢測(T1 供應商裝配)
任務: 識別膠水溢位
設定:
- ROI: 閥門表面周圍的矩形
- 畫素類別:
- 膠水(黃色畫素)
結果: 黃色高亮顯示 AI 模型檢測到的缺陷,原始影象作為參考顯示
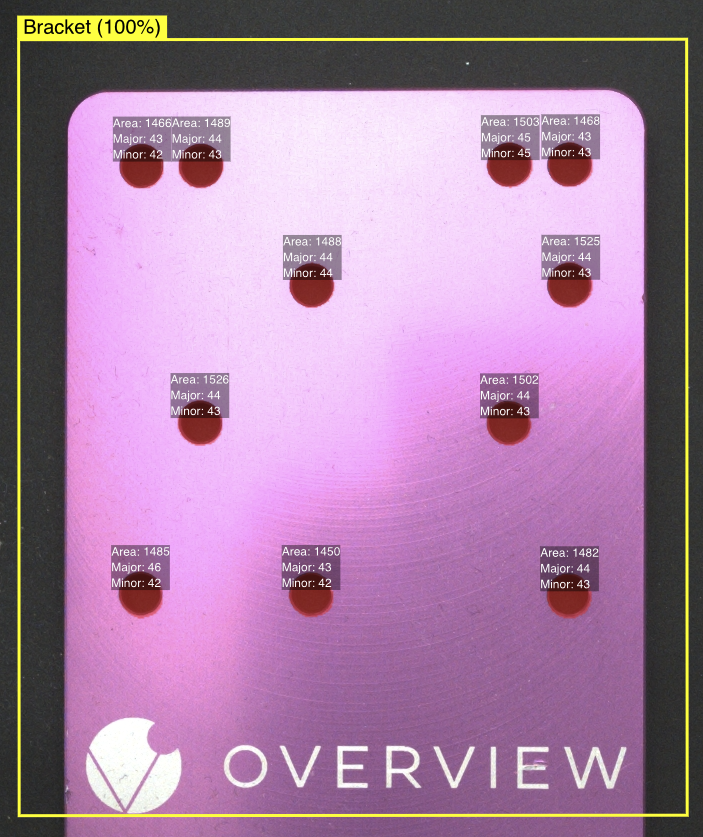
間隙尺寸測量(T1 供應商裝配)
任務: 驗證檢測的間隙是否符合規定尺寸
設定:
- ROI: 間隙區域周圍的矩形
- 測量邏輯: 基於畫素面積值的透過條件
- 類別:
- 藍色畫素用於教 AI 識別距離的樣子
- 良品 - 面積 <100 畫素(透過)
- 缺陷 - 面積 > 100 畫素(失敗)

結果: 透過精確的畫素計數實現間隙尺寸的精確測量
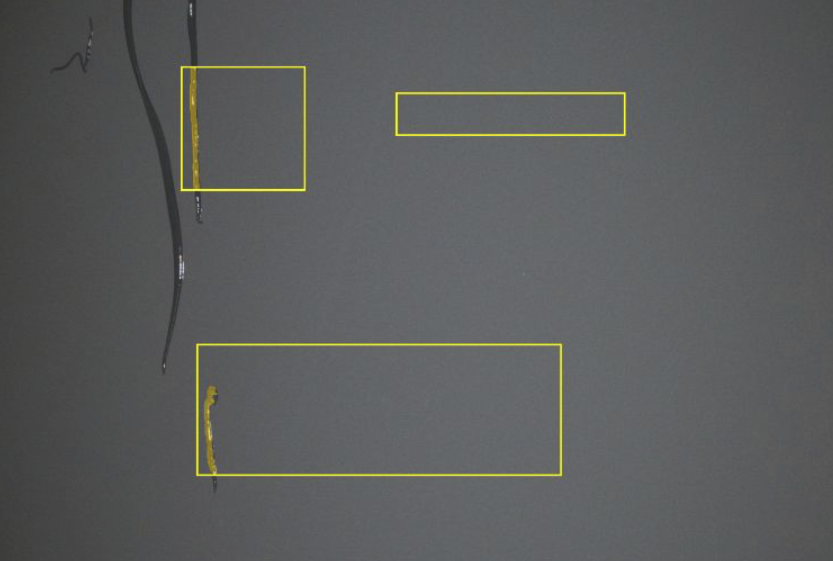
油漆飛濺檢測
任務: 識別表面上的油漆飛濺
設定:
- ROI: 感興趣區域 (ROI) 周圍的矩形
- 畫素類別:
- 黃色畫素用於教 AI 識別油漆的樣子
結果: 畫素級的油漆飛濺檢測
同時檢測多個特徵
分割器可以透過定義獨立的畫素類別來同時檢測多個特徵。例如,您可以訓練單個分割器在同一 ROI 中檢測劃痕(類別 1)、凹痕(類別 2)和汙漬(類別 3)。每個類別透過使用不同的標籤塗繪該缺陷型別的畫素來獨立訓練。分割器會在單次處理中識別所有缺陷型別,並報告哪些畫素屬於哪個類別。
這與分類不同,分類中整個 ROI 只獲得單個標籤。而透過分割,同一影象中可以同時存在多種缺陷型別,每種型別都有其獨立的畫素級遮罩。
對比
| 方面 | 分類器 | 分割器 |
|---|---|---|
| 告訴你什麼 | 類別(透過/失敗等) | 缺陷的精確畫素 |
| 標註工作量 | 低:每張影象選擇一個類別 | 高:繪製缺陷畫素 |
| 所需資料 | 每個類別 10-15 張影象即可開始 | 類似,但標註耗時更長 |
| ROI 大小 | 在小 ROI 下表現最佳 | 更適合處理較大的 ROI |
| 最適合 | 存在/缺失、類別判斷 | 劃痕、汙漬、測量、畫素級檢測 |
節拍效能
| 模型型別 | 檢測速度 | 最佳應用場景 |
|---|---|---|
| 分割 | 最快 | 高速生產線 |
| 分類(精確) | 較慢 | 質量要求嚴格的檢測 |
| 分類(快速) | 中等 | 測試與原型開發 |
分割模型提供最快的檢測節拍,是高吞吐量生產環境的理想選擇。
何時選擇各類模型
在以下情況選擇分類:
- 你只需要簡單的良/不良分類
- 整個 ROI 可以被標註為幾個類別之一
- 整體狀態評估已足夠
- 預期缺陷位置固定
- 你希望在設定過程中更快地完成標註
最適合: Go/No-Go 判斷、元件存在/缺失、整體質量評估
在以下情況選擇分割:
- 缺陷可能出現在檢測區域的任何位置
- 你需要測量缺陷的大小或面積
- 一張影象中可能存在多種缺陷型別
- 需要精確的位置定位
- 最快的節拍對生產至關重要
最適合: 表面缺陷、間隙測量、覆蓋驗證、位置不固定的瑕疵
分類器設定更快、所需訓練影象更少,且適用於大多數透過/失敗檢測。如果之後需要畫素級細節,仍可隨時切換為分割器。從簡單方案入手可以讓你快速驗證設定。
分割器在標註時需要進行畫素級標註,相比為分類器選擇一個類別要耗時得多。相比分類器,請為初始設定和標註預留更多時間,尤其是在訓練影象較多的情況下。
分類器和分割器均以最大 512x512 畫素的解析度處理 ROI 裁剪影象。任何大於此尺寸的 ROI 都會在 AI 處理之前被縮小,這意味著小缺陷可能會變得不可見。請儘量保持 ROI 小以保留細節,或者如果你需要覆蓋大範圍同時檢測細小缺陷,請使用帶有較大 ROI 的分割器。
重疊區域
確實存在重疊。許多檢測任務使用任一方式都能完成。如果你不確定:
- 先從分類器開始。 設定更簡單,標註更快
- 如果發現分類器精度不夠(無法在大區域中檢測小缺陷,或者需要測量),再切換為分割器
- 在 tools.overview.ai 上諮詢 AI Assistant。描述你的應用,它會推薦最佳方案
訓練模式摘要
| 訓練模式 | 模型型別 | 生產就緒 | 備註 |
|---|---|---|---|
| Fast Classifier | 分類 | 否 | 快速設定,適用於測試和原型開發 |
| Accurate Classifier | 分類 | 是 | 生產就緒,精度更高 |
| Accurate Segmenter | 分割 | 是 | 針對生產最佳化的單一高精度模式 |
OV20i 與 OV80i
- OV20i: 每個程式選擇一種模型,分類器或分割器二選一
- OV80i: 支援多模型。可在單個程式內對同一捕獲同時執行分類器和分割器。例如,使用分類器 ROI 檢查元件存在性(透過/失敗),同時使用分割器 ROI 檢測同一零件上的表面缺陷。兩個模型在每次觸發時都會執行併產生獨立的結果。