AI 驅動文件
您想了解什麼?
AI對齊器(深度學習)
AI 對齊器是一種新的對齊方法,它直接從模板學習零件的視覺特徵,而不僅僅依賴於邊緣。它解決了與經典對齊器相同的問題,確保每個下游檢查都從相同的角度觀察零件,但它適用於經典對齊器難以處理的零件:紋理表面、顏色或光照變化的零件,以及邊緣模糊或不一致的零件。
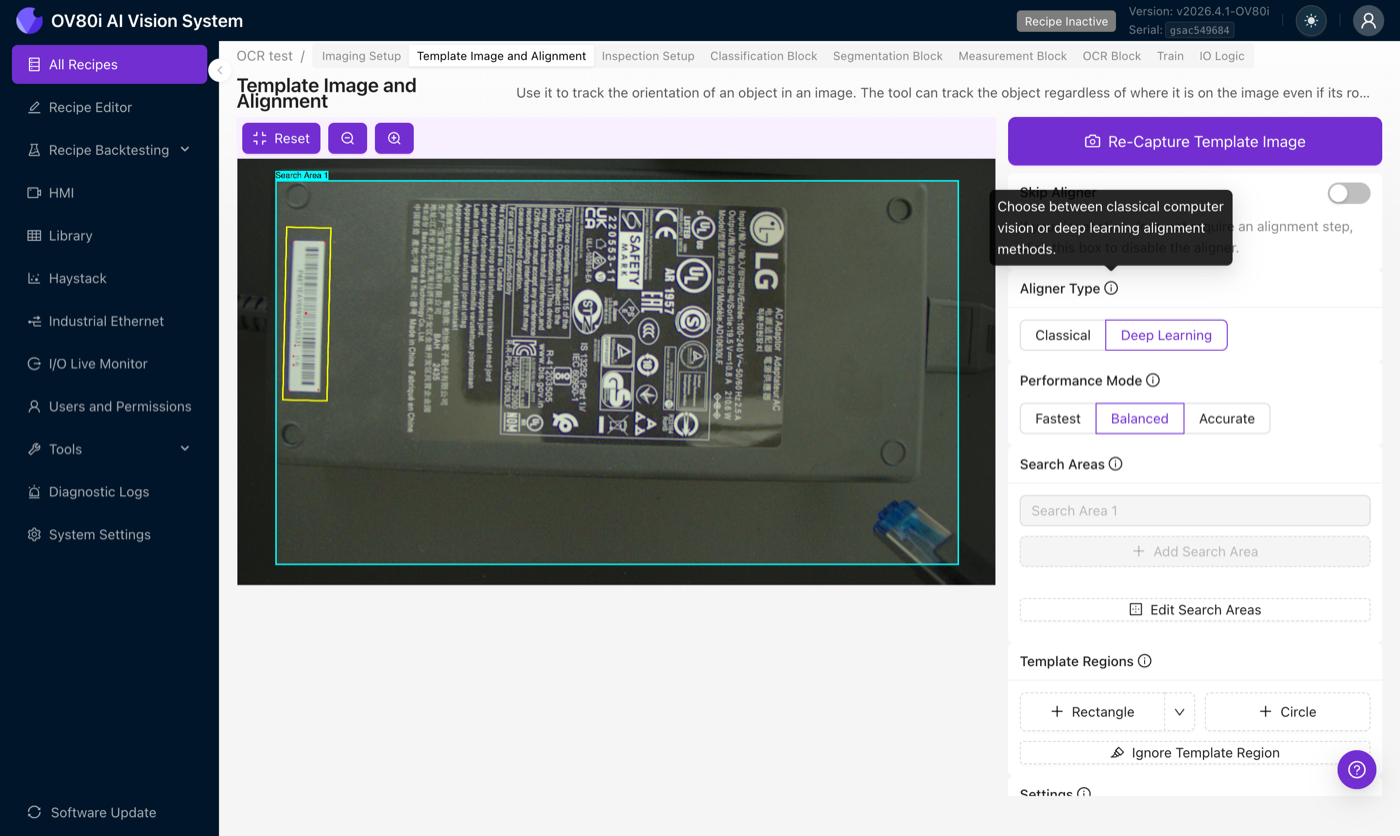
當您開啟配方編輯器的模板影象和對齊步驟時,您現在可以為每個配方選擇任一對齊器。
AI 對齊器是基於深度學習的對齊管道在相機上的首次釋出。經典(基於邊緣)對齊器仍然可用,並且仍然是許多檢查的正確選擇,請參見下面的決策矩陣。
學習目標
到本頁結束時,您將能夠:
- 決定何時使用 AI 對齊器而不是經典對齊器
- 使用正確的效能模式、靈敏度和置信閾值配置 AI 對齊器
- 為紋理零件設定一個穩健的模板
- 識別故障模式並透過正確的配置(或回退到經典對齊器)進行恢復
與配方中更下方的 AI 模組(分類、分割、測量)不同,AI 對齊器使用的是完全預訓練的通用特徵匹配器。您無需收集資料集或標記任何內容,只需捕獲一個模板即可。
何時使用 AI 對齊器與經典對齊器
| 使用案例 | 經典 | AI(深度學習) |
|---|---|---|
| 豐富的紋理(文字、PCB 線路、鍵盤、徽標) | 可以 | 最佳選擇 |
| 平坦/無紋理表面(空白塑膠、光滑金屬) | 最佳選擇 | 較差,專注於不存在的內部紋理 |
| 主要由輪廓/邊緣定義的零件 | 最佳選擇 | 較差 |
| 顏色或光照變化的零件(塗漆門、多色批次) | 可能失敗 | 最佳選擇 |
| 平面內旋轉 | 支援 360° | 僅支援 ~45° |
| 平面外傾斜/透視偏移 | 最佳選擇 | 較差 |
| 部分遮擋(零件被夾具部分遮擋) | 可能失敗 | 穩健 |
| 與相機距離不同的零件 | 良好(縮放模式) | 原生,內建縮放不變性 |
| 鏡面反射/鏡面零件 | 較差 | 較差,熱點會欺騙匹配器 |
| 重複圖案(織物、網格、格子) | 變化 | 較差,匹配器無法區分相同點 |
| 週期時間 | 最快 | ~70–200 毫秒,具體取決於模式 |
AI 對齊器背後的預訓練模型是為風景攝影構建的,它們從未見過倒置的辦公大樓。對於您的零件,這意味著超過大約 45° 的旋轉將無法對齊。如果您的零件可以在輸送帶上旋轉 360°,請使用經典對齊器。
切換到 AI 對齊器
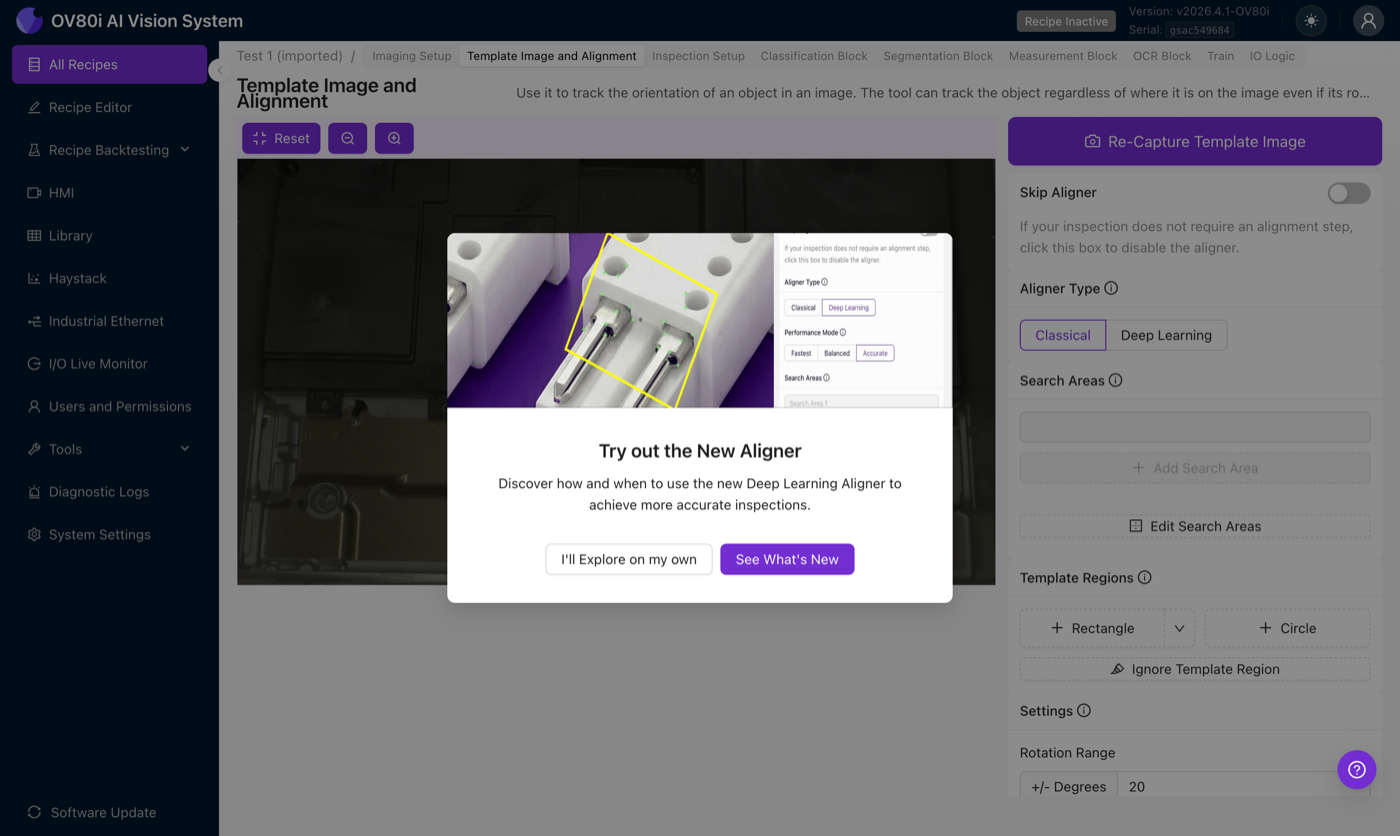
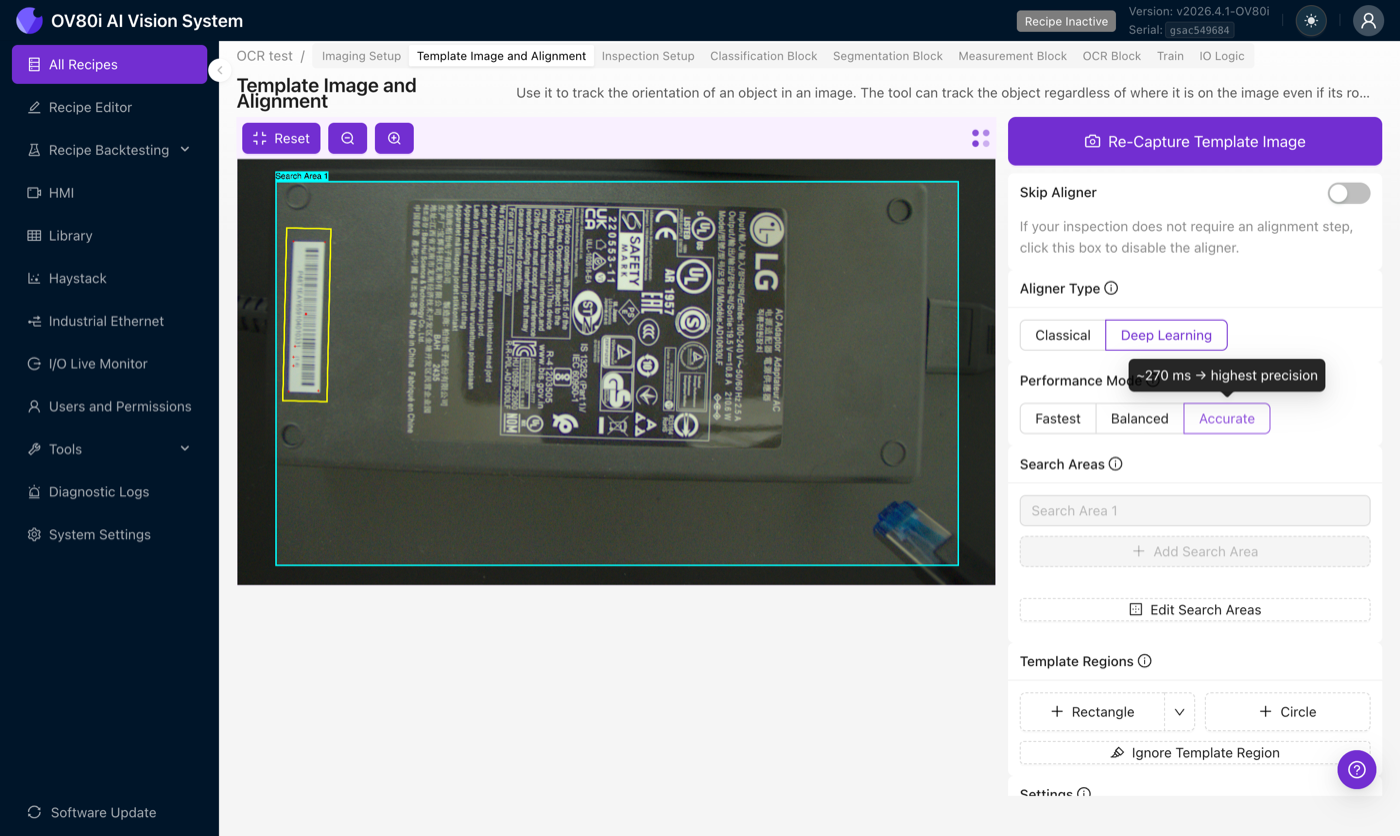
在配方編輯器的 模板影象和對齊 步驟中,找到 對齊器型別 單選組並選擇 深度學習。第一次開啟此螢幕時,您將看到一個介紹新對齊器的入門指南:
一旦選擇了深度學習,旋轉範圍的數字輸入將被禁用,並且會出現 效能模式 選擇器。對齊器現在使用其自己的尺度處理管道,因此旋轉和縮放不再在此螢幕上以數字形式配置。
效能模式
匹配步驟(LightGlue)與關鍵點數量呈 平方 關係,關鍵點數量翻倍大約會使計算量增加四倍。三個預設調節關鍵點數量和處理解析度:
| 模式 | 關鍵點 | 影象解析度 | LightGlue 層數 | 推理時間 |
|---|---|---|---|---|
| 最快 | 256 | 1/4 降取樣 | 3 | ~70 ms |
| 平衡 | 256 | 1/2 降取樣 | 3 | ~150 ms |
| 精確 | 512 | 1/2 降取樣 | 3 | ~270 ms |
推理時間是在 Jetson Orin GPU 上使用 TensorRT 測量的。兩個階段都與關鍵點數量成比例,因此精確模式同時翻倍關鍵點和時間。
最快
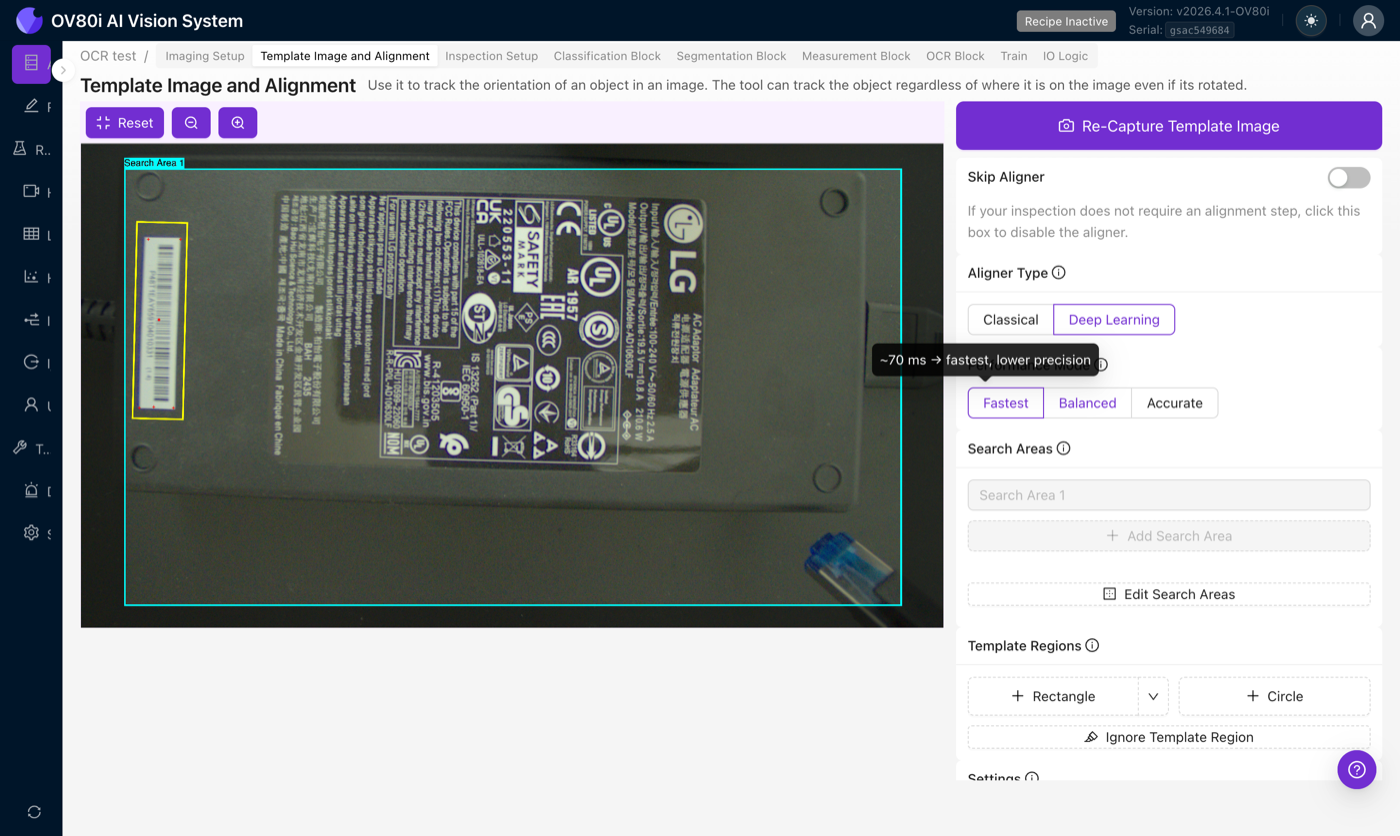
最低解析度和最少關鍵點。推理時間:~70 ms。 從這裡開始。對於相當數量的配方,這就是您所需的全部,並且為其餘管道節省了週期時間。
平衡
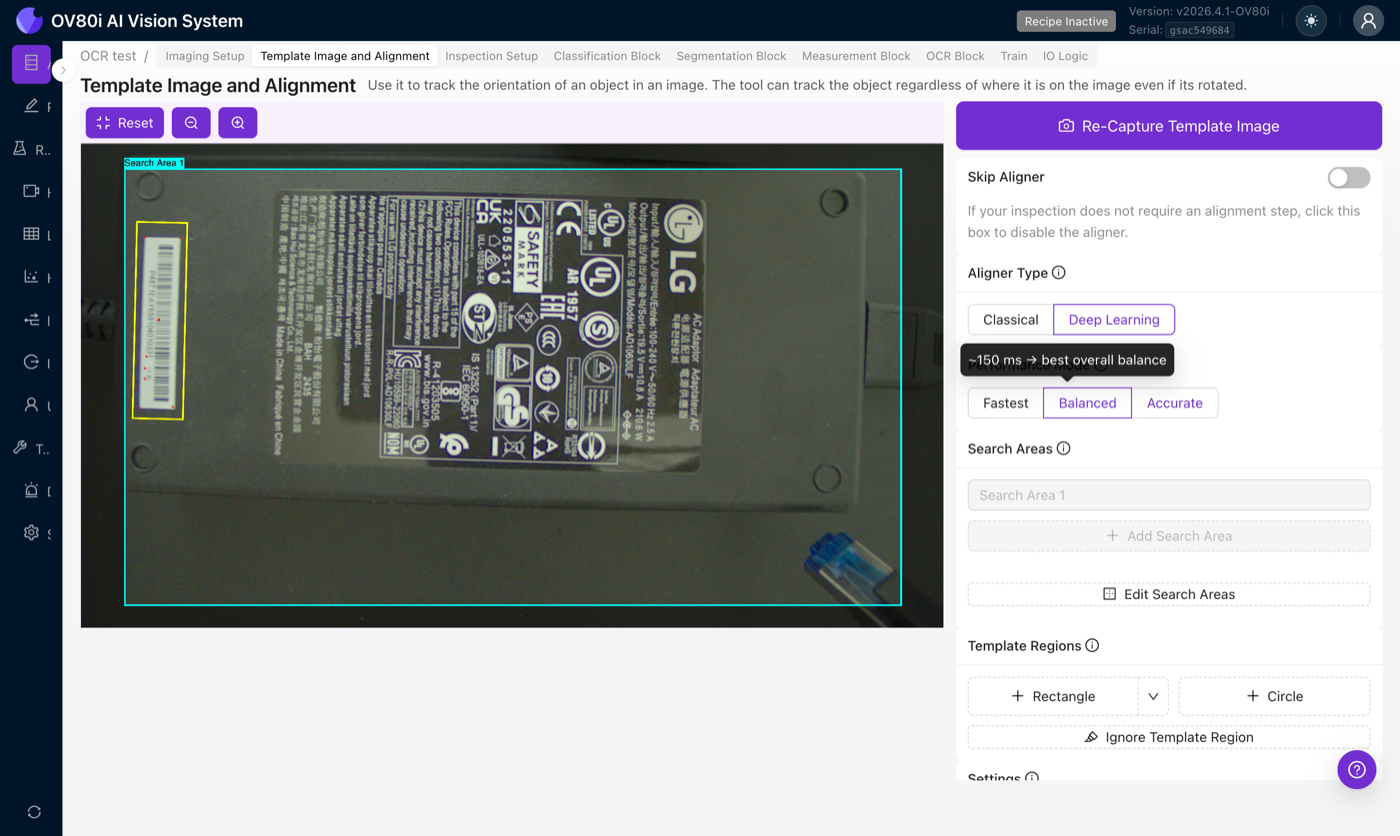
更高的解析度,適中的關鍵點數量。推理時間:~150 ms。 當最快模式未能完全鎖定但您仍然關心週期時間時的最佳選擇。
精確
最高解析度和最密集的關鍵點分佈。推理時間:~270 ms。 用於最棘手的對齊情況,您願意為延遲付出代價。
Adriano 的經驗法則:從最快開始,執行實時預覽,只有在匹配不穩定時才提升到平衡或精確。相反(從精確開始,希望之後降低)往往會隱藏最快模式會立即暴露的不穩定性。
設定
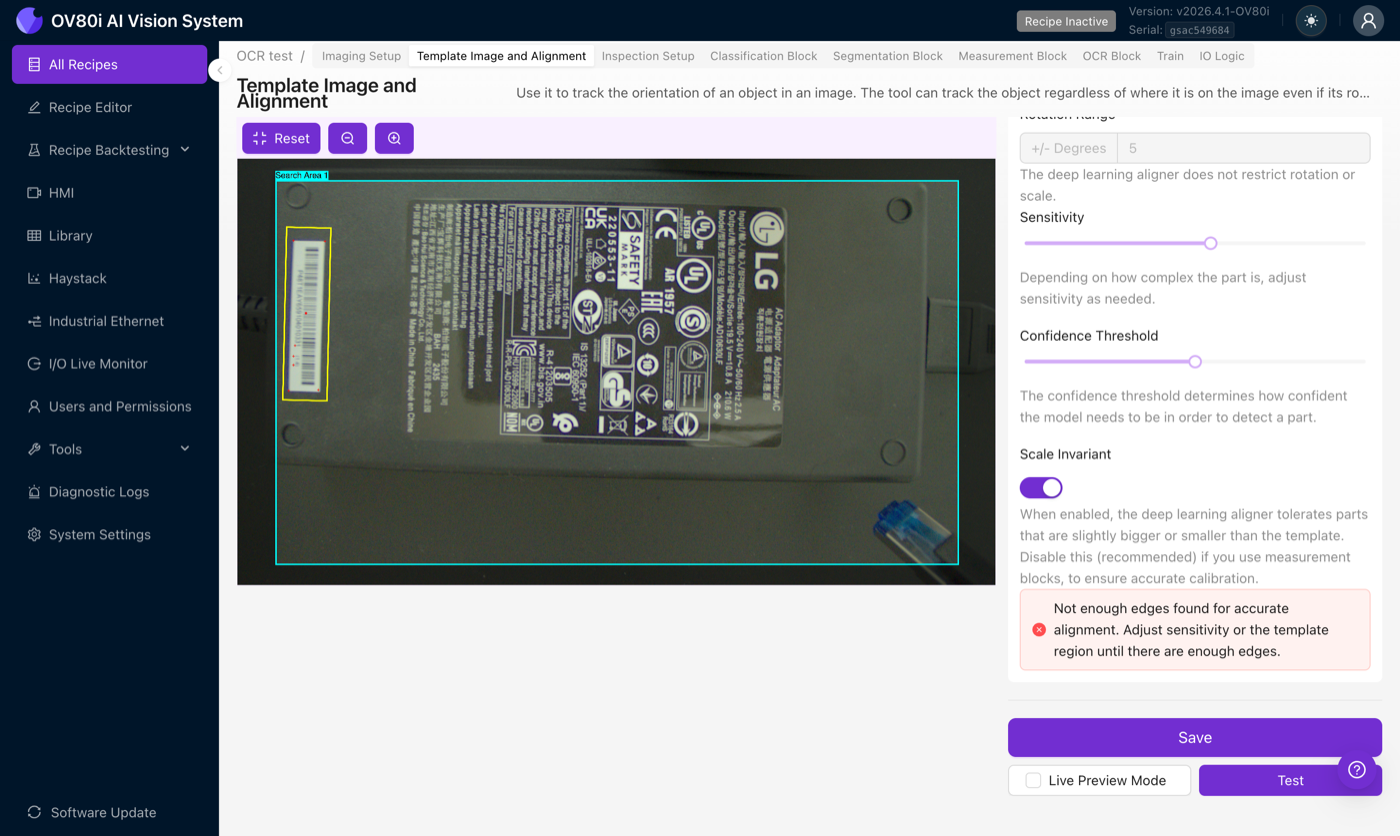
旋轉範圍
在選擇深度學習時禁用,AI 對齊器不限制旋轉(在其 ~45° 工作視窗內)或縮放。灰色欄位是一個視覺提示,表明此設定僅適用於經典對齊器。
靈敏度
一個 0–2 的滑塊,控制特徵提取器在模板上捕捉到多少關鍵點。更高的靈敏度意味著更多的關鍵點,包括一些噪聲點;較低的靈敏度僅保留最強的點。
- 提高靈敏度 適用於特徵較少的零件(光滑零件上有幾個標記、平面背景上的徽標)。通常從 1.3–1.5 開始,高於您在經典對齊器上使用的值。
- 降低靈敏度 如果匹配器不斷錨定到背景噪聲或夾具上的絨毛/灰塵顆粒。
置信度閾值
一個 0–1 的滑塊,用於設定在對齊器報告成功對齊之前所需的最低匹配置信度。
AI 對齊器自然產生的 置信度值較低,而經典對齊器的 80% 置信度是非常強的匹配;而 AI 的 80% 置信度則很少見。在切換到 AI 時,相應地降低你的置信度閾值,預設值在 0.5 左右比你在經典對齊器上使用的更合適。僅在同一對齊器上、同一檢測中比較置信度值。
尺度不變
開啟時,對齊器可以容忍與模板相比稍微靠近或遠離相機的零件。關閉時,對齊器期望每次零件與模板保持相同的距離。
測量塊依賴於畫素到物理單位的校準。如果對齊器重新縮放了幀,該校準將不再準確。在任何輸入測量塊的配方中保持 尺度不變關閉。
模板最佳實踐
模板決定了匹配器可以識別和不能識別的內容。在這裡花時間,一個更好的模板意味著更好的對齊器。每次捕獲時遵循以下四步檢查清單:
- 在光線良好且對焦清晰的情況下捕獲零件。 無運動模糊,無熱點。模糊會破壞關鍵點的重複性。
- 包含獨特特徵。 文字、邊緣、接縫、印刷標記、貼紙圖案,任何與影象其餘部分看起來不同的東西。避免空白區域。
- 檢查除錯覆蓋層。 你希望零件上有 至少 10 個健康的關鍵點。低於這個數量,匹配器的工作內容太少。
- 提高置信度閾值,直到假陽性停止。 從預設值開始,逐步提高,直到對齊器停止報告空幀或錯誤零件的虛假匹配。
其他指導:
- 用零件填滿框架。 AI 對齊器在模板覆蓋大部分捕獲時表現最佳,而不是僅覆蓋一小塊。模板與輸入幀之間的 1:1 關係是理想的。
- 謹慎使用忽略區域。 經典對齊器對背景噪聲敏感,並受益於緊湊的忽略區域;而 AI 對齊器對雜散的背景點大多具有魯棒性。僅在背景的特定區域持續困擾匹配器(重複圖案、眩光熱點)時新增忽略區域。
如果更換鏡頭、調整變焦、更換照明或修改任何成像設定,請 重新拍攝模板。關鍵點是錨定在畫素級外觀上的,任何這些更改都會改變特徵在幀中的位置。
當小地標上的緊湊模板無法可靠鎖定時,嘗試相反的方法:刪除模板並繪製一個覆蓋整個零件的新模板(直到零件與背景相接的地方)。不要新增忽略區域。這為 AI 對齊器提供了最大數量的關鍵點,通常可以鎖定小模板失敗的地方。這與經典建議相反,請在 AI 路徑中有意識地使用它。
失敗模式及應對措施
快速現場參考,四種最常見的故障及首要嘗試的措施。
| 症狀 | 發生了什麼 | 首先嚐試的措施 |
|---|---|---|
| 無匹配(對看起來正常的部件報告失敗) | 除錯覆蓋層在部件上顯示的關鍵點少於 5 個 | 提高靈敏度,或切換到平衡/準確模式。如果部件沒有紋理,請切換到經典模式。 |
| 位置錯誤(對齊鎖定但位置錯誤) | 部件到達時旋轉超出角度容差 | 擴大角度容差,或如果旋轉可以超過 ~30°,請切換到經典模式。 |
| 迴圈時間慢 | 準確模式正在執行,但部件不需要那麼高的密度 | 降低到最快模式,或縮小搜尋區域。 |
| 間歇性故障(有時有效,有時失敗) | 仿射矩陣在除錯檢視中顯示不現實的剪下或縮放 | 提高置信度閾值,在受控光照下重新捕捉模板,或檢查振動/運動模糊。 |
其他情況:
- 置信度遠低於您以前的經典閾值。 這是預期的,AI 產生的置信度值較低。請在 AI 對齊器內進行比較,而不是跨對齊器型別進行比較。
- 金屬部件上的鏡面反射導致對齊偏移。 熱點作為靜態關鍵點,拉偏對齊。調整光照以消除熱點,或在光照無法修復時使用經典模式。
- 重複圖案(織物、網格、針行),對齊不穩定。 匹配器無法區分相似的點。兩個對齊器在這裡都不理想;經典模式在非重複特徵上使用緊錨點通常效果最佳。
一旦對齊正常,除錯覆蓋層應在部件上顯示密集的自信綠色匹配簇,仿射矩陣應具有合理的平移和旋轉值(無極端剪下或縮放),並且置信度應在捕捉過程中保持穩定,而不是上下波動。
使用實時預覽進行驗證
配置對齊器後,點選 儲存,然後開啟 實時預覽模式,並觸發捕捉或在相機下移動部件。觀察:
- 檢測到的部件位置是否隨著實際部件的移動而跟蹤?
- 置信度值在捕捉過程中是否穩定,還是會出現峰值和低谷?
- 當您遮擋部分物體時,對齊器是否仍然鎖定,還是會漂移?
在輕微移動和部分遮擋下保持穩定匹配是您要尋找的訊號。與生產中的不穩定匹配相比,現在更容易進行診斷。