AI 驱动文档
您想了解什么?
AI对齐器(深度学习)
AI 对齐器是一种新的对齐方法,它直接从模板学习零件的视觉特征,而不仅仅依赖于边缘。它解决了与经典对齐器相同的问题,确保每个下游检查都从相同的角度观察零件,但它适用于经典对齐器难以处理的零件:纹理表面、颜色或光照变化的零件,以及边缘模糊或不一致的零件。
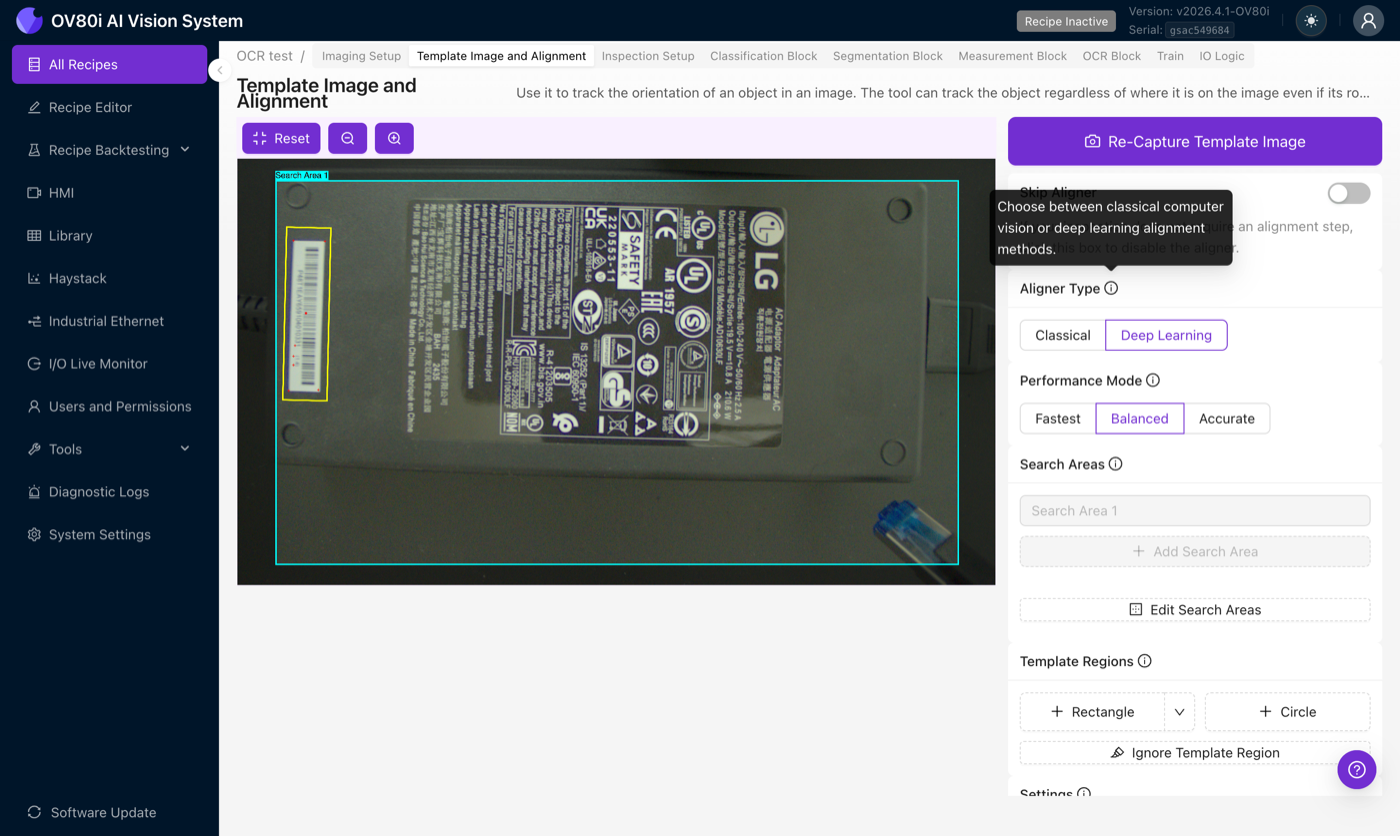
当您打开配方编辑器的模板图像和对齐步骤时,您现在可以为每个配方选择任一对齐器。
AI 对齐器是基于深度学习的对齐管道在相机上的首次发布。经典(基于边缘)对齐器仍然可用,并且仍然是许多检查的正确选择,请参见下面的决策矩阵。
学习目标
到本页结束时,您将能够:
- 决定何时使用 AI 对齐器而不是经典对齐器
- 使用正确的性能模式、灵敏度和置信阈值配置 AI 对齐器
- 为纹理零件设置一个稳健的模板
- 识别故障模式并通过正确的配置(或回退到经典对齐器)进行恢复
与配方中更下方的 AI 模块(分类、分割、测量)不同,AI 对齐器使用的是完全预训练的通用特征匹配器。您无需收集数据集或标记任何内容,只需捕获一个模板即可。
何时使用 AI 对齐器与经典对齐器
| 使用案例 | 经典 | AI(深度学习) |
|---|---|---|
| 丰富的纹理(文本、PCB 线路、键盘、徽标) | 可以 | 最佳选择 |
| 平坦/无纹理表面(空白塑料、光滑金属) | 最佳选择 | 较差,专注于不存在的内部纹理 |
| 主要由轮廓/边缘定义的零件 | 最佳选择 | 较差 |
| 颜色或光照变化的零件(涂漆门、多色批次) | 可能失败 | 最佳选择 |
| 平面内旋转 | 支持 360° | 仅支持 ~45° |
| 平面外倾斜/透视偏移 | 最佳选择 | 较差 |
| 部分遮挡(零件被夹具部分遮挡) | 可能失败 | 稳健 |
| 与相机距离不同的零件 | 良好(缩放模式) | 原生,内置缩放不变性 |
| 镜面反射/镜面零件 | 较差 | 较差,热点会欺骗匹配器 |
| 重复图案(织物、网格、格子) | 变化 | 较差,匹配器无法区分相同点 |
| 周期时间 | 最快 | ~70–200 毫秒,具体取决于模式 |
AI 对齐器背后的预训练模型是为风景摄影构建的,它们从未见过倒置的办公大楼。对于您的零件,这意味着超过大约 45° 的旋转将无法对齐。如果您的零件可以在输送带上旋转 360°,请使用经典对齐器。
切换到 AI 对齐器
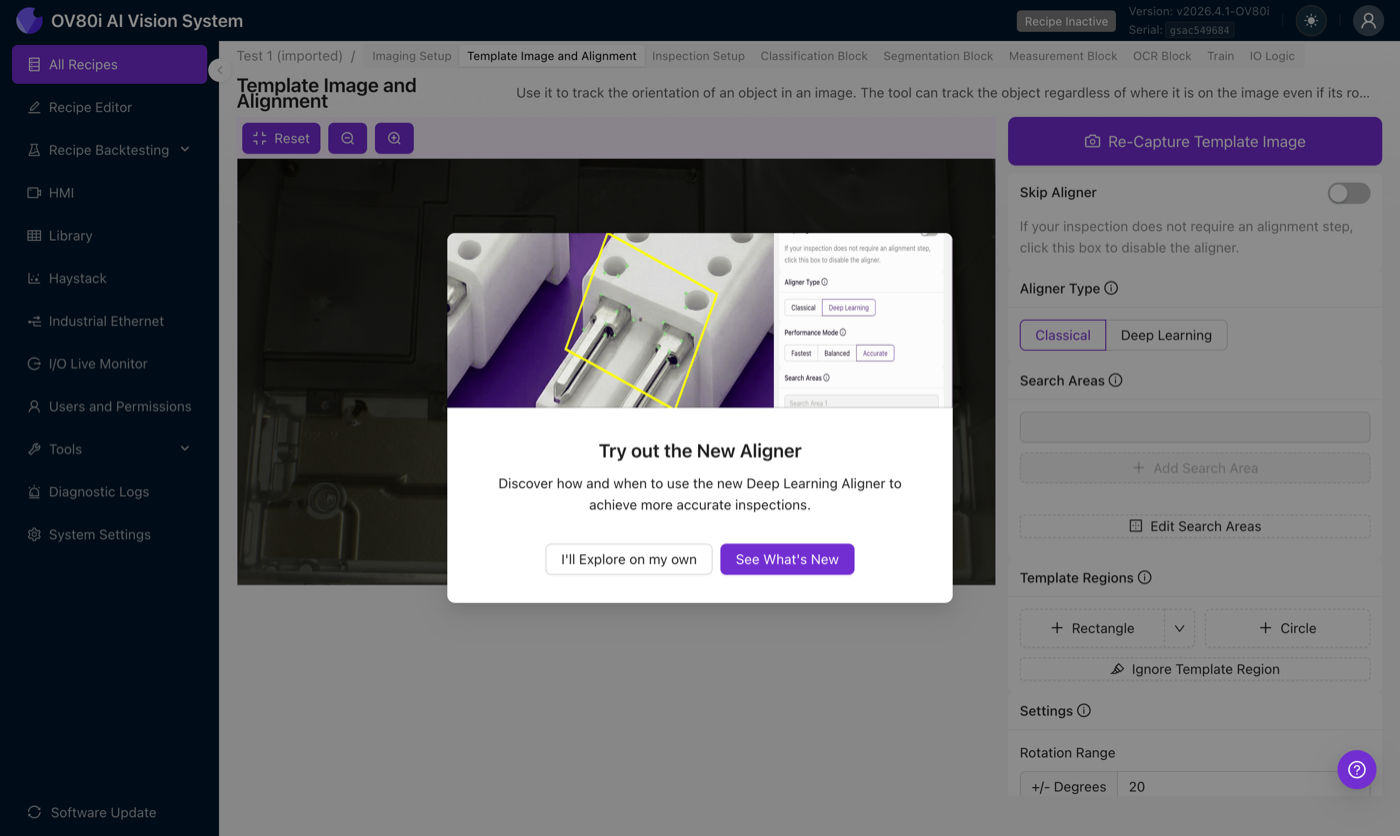
在配方编辑器的 模板图像和对齐 步骤中,找到 对齐器类型 单选组并选择 深度学习。第一次打开此屏幕时,您将看到一个介绍新对齐器的入门指南:
一旦选择了深度学习,旋转范围的数字输入将被禁用,并且会出现 性能模式 选择器。对齐器现在使用其自己的尺度处理管道,因此旋转和缩放不再在此屏幕上以数字形式配置。
性能模式
匹配步骤(LightGlue)与关键点数量呈 平方 关系,关键点数量翻倍大约会使计算量增加四倍。三个预设调节关键点数量和处理分辨率:
| 模式 | 关键点 | 图像分辨率 | LightGlue 层数 | 推理时间 |
|---|---|---|---|---|
| 最快 | 256 | 1/4 降采样 | 3 | ~70 ms |
| 平衡 | 256 | 1/2 降采样 | 3 | ~150 ms |
| 精确 | 512 | 1/2 降采样 | 3 | ~270 ms |
推理时间是在 Jetson Orin GPU 上使用 TensorRT 测量的。两个阶段都与关键点数量成比例,因此精确模式同时翻倍关键点和时间。
最快
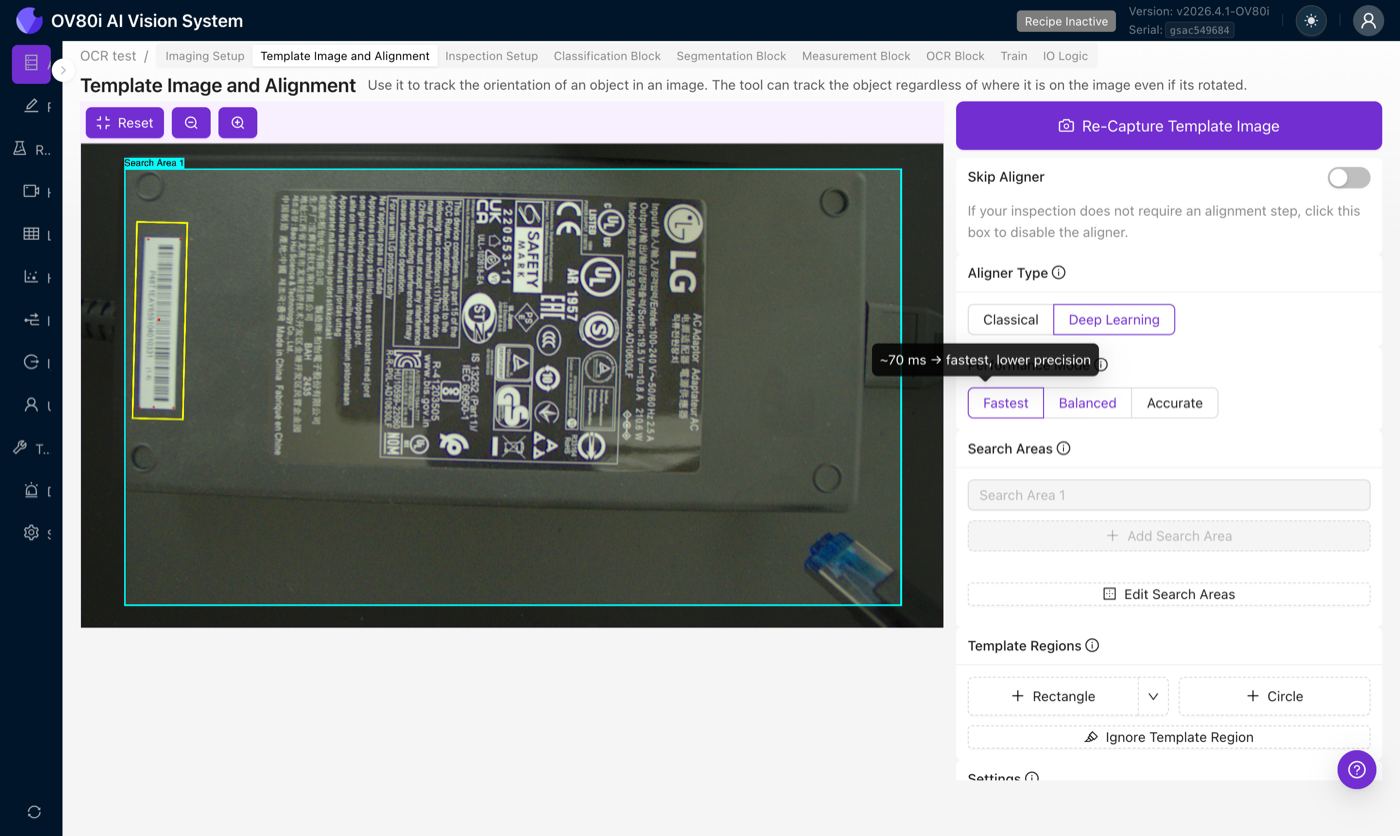
最低分辨率和最少关键点。推理时间:~70 ms。 从这里开始。对于相当数量的配方,这就是您所需的全部,并且为其余管道节省了周期时间。
平衡
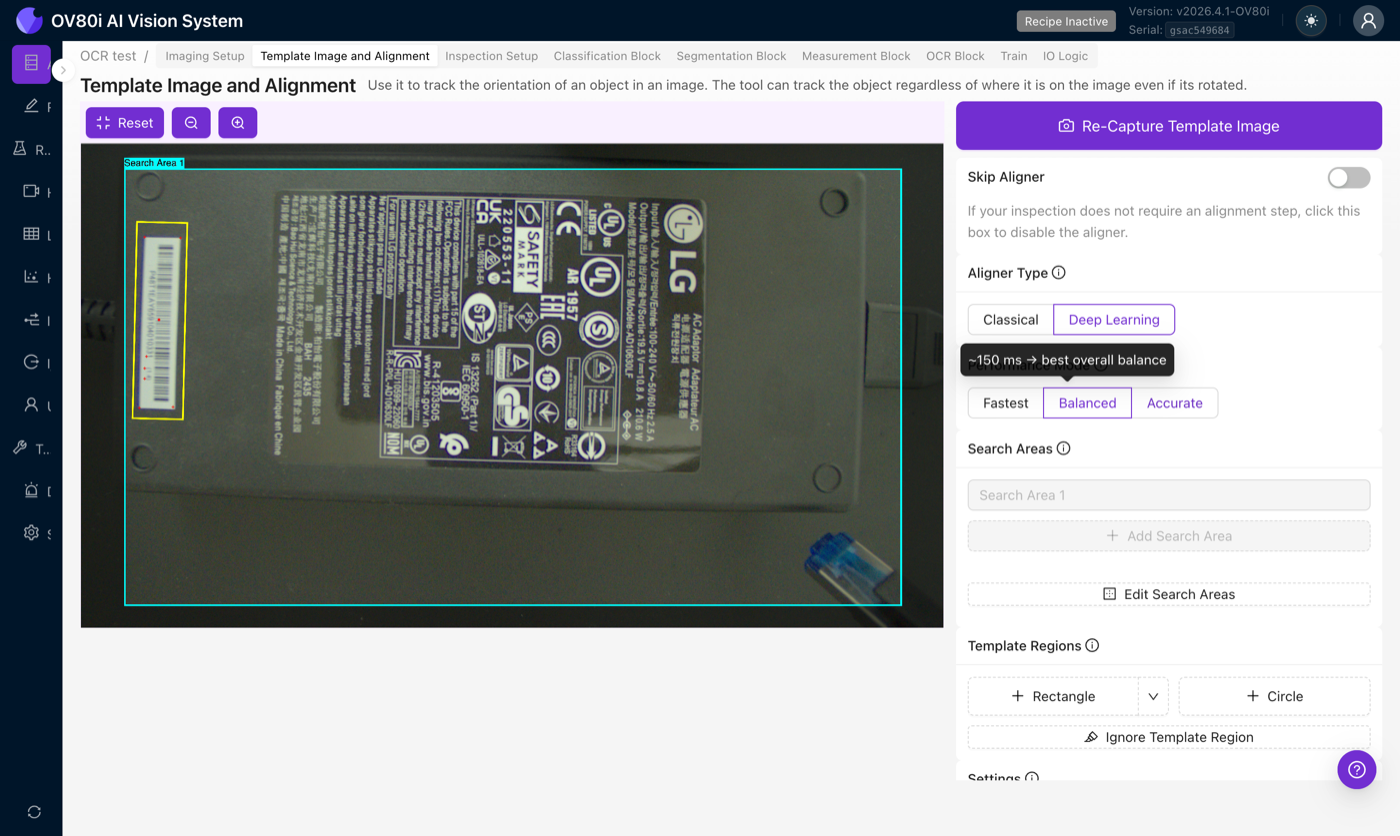
更高的分辨率,适中的关键点数量。推理时间:~150 ms。 当最快模式未能完全锁定但您仍然关心周期时间时的最佳选择。
精确
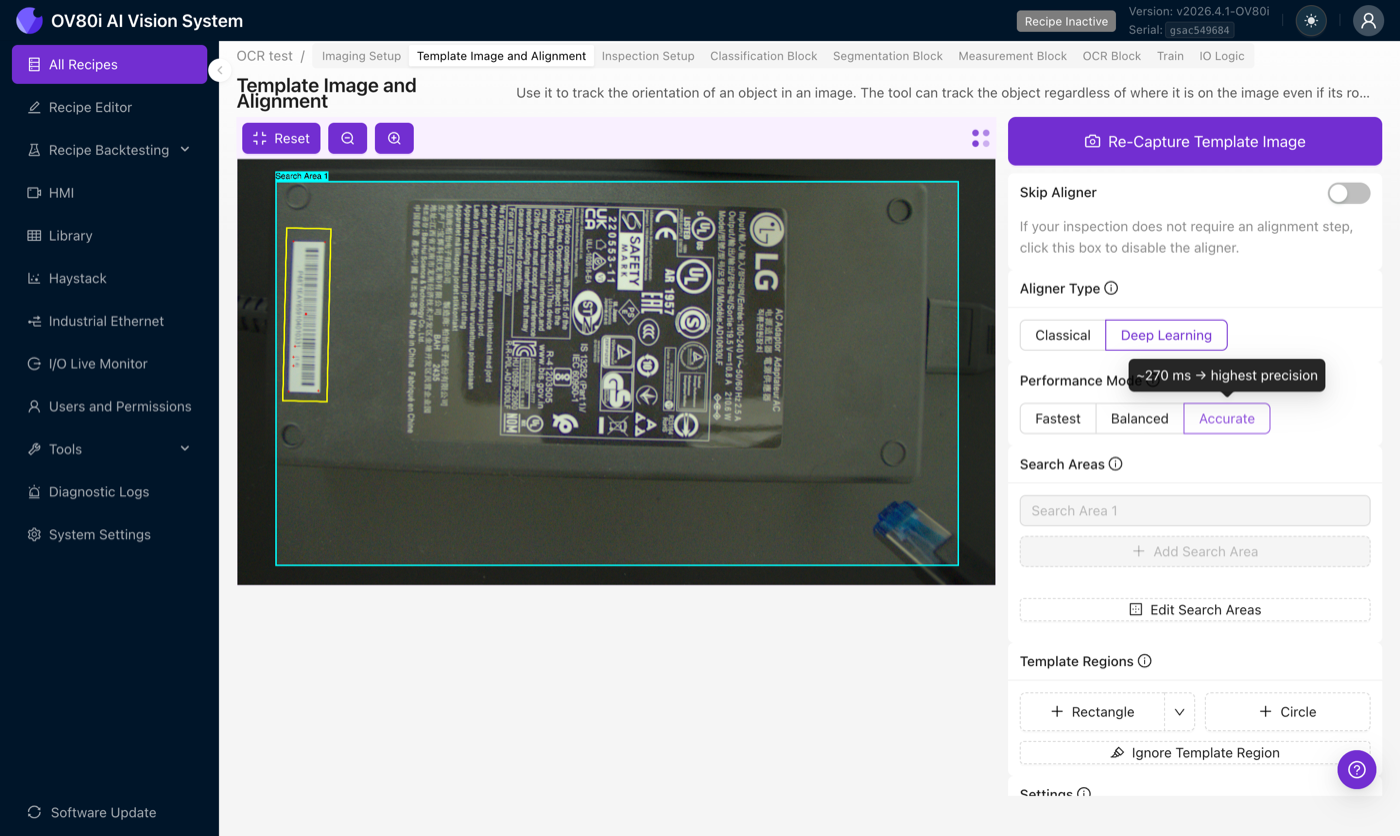
最高分辨率和最密集的关键点分布。推理时间:~270 ms。 用于最棘手的对齐情况,您愿意为延迟付出代价。
Adriano 的经验法则:从最快开始,运行实时预览,只有在匹配不稳定时才提升到平衡或精确。相反(从精确开始,希望之后降低)往往会隐藏最快模式会立即暴露的不稳定性。
设置
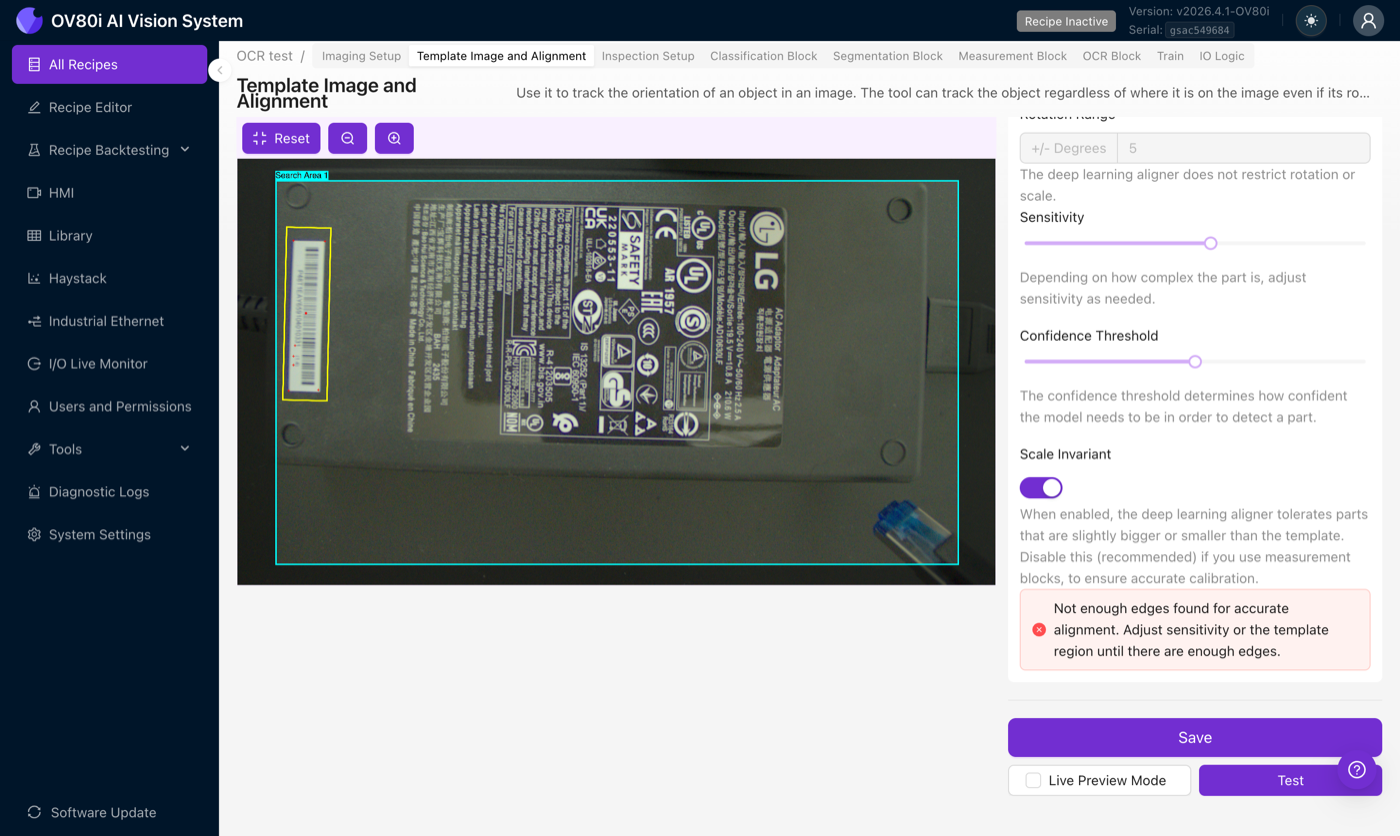
旋转范围
在选择深度学习时禁用,AI 对齐器不限制旋转(在其 ~45° 工作窗口内)或缩放。灰色字段是一个视觉提示,表明此设置仅适用于经典对齐器。
灵敏度
一个 0–2 的滑块,控制特征提取器在模板上捕捉到多少关键点。更高的灵敏度意味着更多的关键点,包括一些噪声点;较低的灵敏度仅保留最强的点。
- 提高灵敏度 适用于特征较少的零件(光滑零件上有几个标记、平面背景上的徽标)。通常从 1.3–1.5 开始,高于您在经典对齐器上使用的值。
- 降低灵敏度 如果匹配器不断锚定到背景噪声或夹具上的绒毛/灰尘颗粒。
置信度阈值
一个 0–1 的滑块,用于设置在对齐器报告成功对齐之前所需的最低匹配置信度。
AI 对齐器自然产生的 置信度值较低,而经典对齐器的 80% 置信度是非常强的匹配;而 AI 的 80% 置信度则很少见。在切换到 AI 时,相应地降低你的置信度阈值,默认值在 0.5 左右比你在经典对齐器上使用的更合适。仅在同一对齐器上、同一检测中比较置信度值。
尺度不变
开启时,对齐器可以容忍与模板相比稍微靠近或远离相机的零件。关闭时,对齐器期望每次零件与模板保持相同的距离。
测量块依赖于像素到物理单位的校准。如果对齐器重新缩放了帧,该校准将不再准确。在任何输入测量块的配方中保持 尺度不变关闭。
模板最佳实践
模板决定了匹配器可以识别和不能识别的内容。在这里花时间,一个更好的模板意味着更好的对齐器。每次捕获时遵循以下四步检查清单:
- 在光线良好且对焦清晰的情况下捕获零件。 无运动模糊,无热点。模糊会破坏关键点的重复性。
- 包含独特特征。 文本、边缘、接缝、印刷标记、贴纸图案,任何与图像其余部分看起来不同的东西。避免空白区域。
- 检查调试覆盖层。 你希望零件上有 至少 10 个健康的关键点。低于这个数量,匹配器的工作内容太少。
- 提高置信度阈值,直到假阳性停止。 从默认值开始,逐步提高,直到对齐器停止报告空帧或错误零件的虚假匹配。
其他指导:
- 用零件填满框架。 AI 对齐器在模板覆盖大部分捕获时表现最佳,而不是仅覆盖一小块。模板与输入帧之间的 1:1 关系是理想的。
- 谨慎使用忽略区域。 经典对齐器对背景噪声敏感,并受益于紧凑的忽略区域;而 AI 对齐器对杂散的背景点大多具有鲁棒性。仅在背景的特定区域持续困扰匹配器(重复图案、眩光热点)时添加忽略区域。
如果更换镜头、调整变焦、更换照明或修改任何成像设置,请 重新拍摄模板。关键点是锚定在像素级外观上的,任何这些更改都会改变特征在帧中的位置。
当小地标上的紧凑模板无法可靠锁定时,尝试相反的方法:删除模板并绘制一个覆盖整个零件的新模板(直到零件与背景相接的地方)。不要添加忽略区域。这为 AI 对齐器提供了最大数量的关键点,通常可以锁定小模板失败的地方。这与经典建议相反,请在 AI 路径中有意识地使用它。
失败模式及应对措施
快速现场参考,四种最常见的故障及首要尝试的措施。
| 症状 | 发生了什么 | 首先尝试的措施 |
|---|---|---|
| 无匹配(对看起来正常的部件报告失败) | 调试覆盖层在部件上显示的关键点少于 5 个 | 提高灵敏度,或切换到平衡/准确模式。如果部件没有纹理,请切换到经典模式。 |
| 位置错误(对齐锁定但位置错误) | 部件到达时旋转超出角度容差 | 扩大角度容差,或如果旋转可以超过 ~30°,请切换到经典模式。 |
| 循环时间慢 | 准确模式正在运行,但部件不需要那么高的密度 | 降低到最快模式,或缩小搜索区域。 |
| 间歇性故障(有时有效,有时失败) | 仿射矩阵在调试视图中显示不现实的剪切或缩放 | 提高置信度阈值,在受控光照下重新捕捉模板,或检查振动/运动模糊。 |
其他情况:
- 置信度远低于您以前的经典阈值。 这是预期的,AI 产生的置信度值较低。请在 AI 对齐器内进行比较,而不是跨对齐器类型进行比较。
- 金属部件上的镜面反射导致对齐偏移。 热点作为静态关键点,拉偏对齐。调整光照以消除热点,或在光照无法修复时使用经典模式。
- 重复图案(织物、网格、针行),对齐不稳定。 匹配器无法区分相似的点。两个对齐器在这里都不理想;经典模式在非重复特征上使用紧锚点通常效果最佳。
一旦对齐正常,调试覆盖层应在部件上显示密集的自信绿色匹配簇,仿射矩阵应具有合理的平移和旋转值(无极端剪切或缩放),并且置信度应在捕捉过程中保持稳定,而不是上下波动。
使用实时预览进行验证
配置对齐器后,点击 保存,然后开启 实时预览模式,并触发捕捉或在相机下移动部件。观察:
- 检测到的部件位置是否随着实际部件的移动而跟踪?
- 置信度值在捕捉过程中是否稳定,还是会出现峰值和低谷?
- 当您遮挡部分物体时,对齐器是否仍然锁定,还是会漂移?
在轻微移动和部分遮挡下保持稳定匹配是您要寻找的信号。与生产中的不稳定匹配相比,现在更容易进行诊断。