AI 驱动文档
您想了解什么?
第四步:训练您的 AI 模型
您的感兴趣区域(ROI)已设置好。现在是时候教 AI 识别什么是"好"和什么是"坏"了。
训练的三条基本规则
在做任何事之前,请牢记这三条规则。无论您是训练分类器还是分割器,无论使用 5 张图像还是 500 张图像,这些规则都适用。
规则 1:仅根据图像进行标注
绝不要通过查看实际零件(或将其置于显微镜下)来判断它是好是坏。如果您在相机图像中看不到缺陷,AI 就无法学习它。
AI 不是魔法。它只能基于相机所见的内容进行工作。如果您因为触摸或用放大镜放大后发现了某些问题而将零件标记为"有缺陷",但相机图像看起来正常,那么您就是在教 AI 识别根本不存在的东西。
如果您仅凭图像无法标注,请返回到安装步骤并修复物理设置:更好的镜头、更好的照明、更近的安装距离或不同的角度。
规则 2:反复检查您的标签
错误标注每个人都会发生;经验丰富的工程师也会犯这种错误。但在小数据集中,一个错误的标签可能会毁掉您的结果。
在 5 张训练图像中,一个错误标注会污染**20%**的训练数据。这是灾难性的。
每次训练运行之前:点击查看所有 ROI并验证每一个标注。这是最容易修复且影响最大的事情。
规则 3:从小处开始,快速迭代
不要标注 50 张图像后才开始训练。相反,建立一个紧密的循环:每个类别标注 10-15 张图像,训练(大约 30 秒),测试并尝试破坏它,然后在失败的地方添加针对性的数据。重复这个循环 2-4 次。
这个循环是通向优秀模型的最快路径。
分步训练工作流程
1. 捕获初始训练图像
在程序处于活动状态且零件流动(或手动放置)的情况下,捕获图像。您需要每个类别至少10-15 张图像才能开始。
对于简单的通过/失败检测:
- 10-15 张良品图像
- 10-15 张缺陷品图像
2. 定义您的类别
选择您要训练的模型类型,然后阅读相应的说明。下面的切换按钮在第 2 步和第 3 步之间保持同步,您的选择会保留在 URL 中,因此刷新或分享后仍然有效。
- Classifier
- Segmenter
在标注界面中,添加每种检测类型所需的类别。常见的分类器类别集:
- 通过 / 失败
- 存在 / 缺失
- 良好 / 划伤 / 破裂
一开始保持简单。您随后随时可以添加类别。
在标注界面中,为您希望 AI 遮罩的缺陷(或特征)添加类别。常见的分割器类别集:
- 缺陷 / 背景
- 划伤 / 裂纹 / 污渍
- 前景 / 背景
一开始保持类别列表简短。每个类别都需要自己的画笔颜色和自己的标注示例,因此一开始添加更多类别会使您的标注工作量成倍增加。
3. 标注图像
- Classifier
- Segmenter
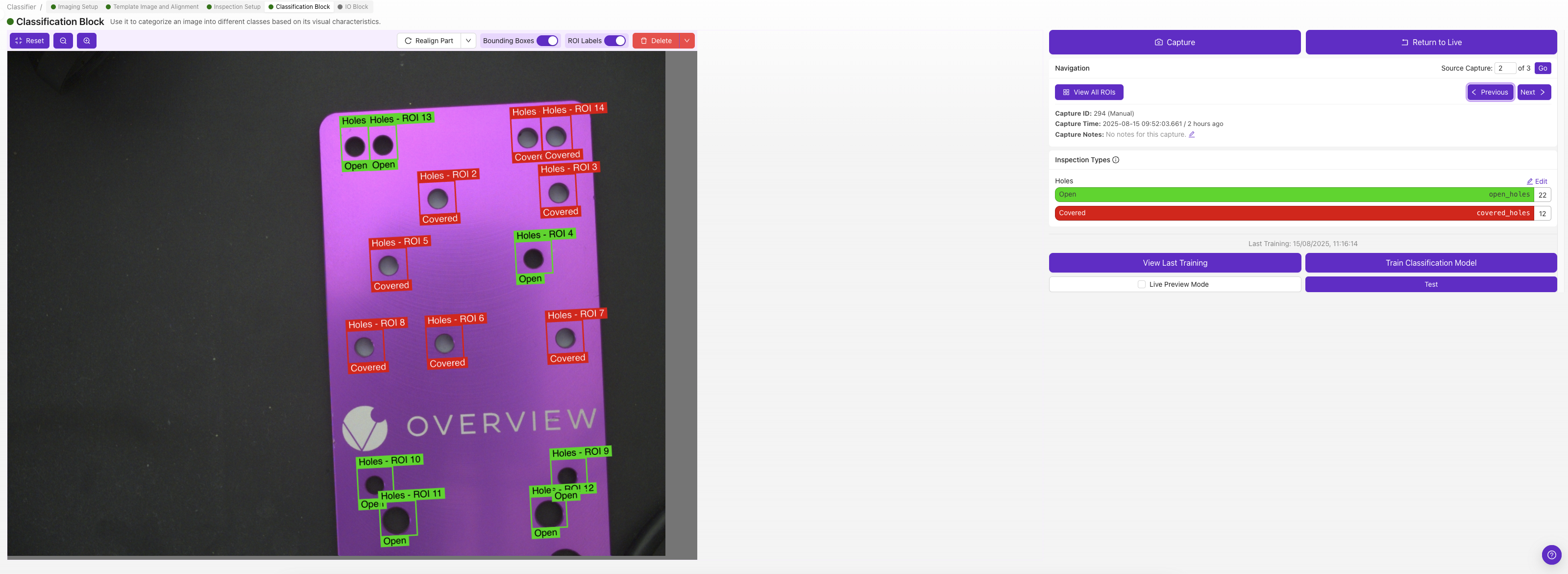
每个 ROI 都有自己的分类类别 — 选择能够描述该图像中该 ROI 的类别(例如 "pass" 或 "fail")。
如果您不确定是使用分类还是分割,请从分类开始。它标注速度更快,并且适用于大多数 pass/fail 场景。请参阅 Classifier vs. Segmenter 获取指导。
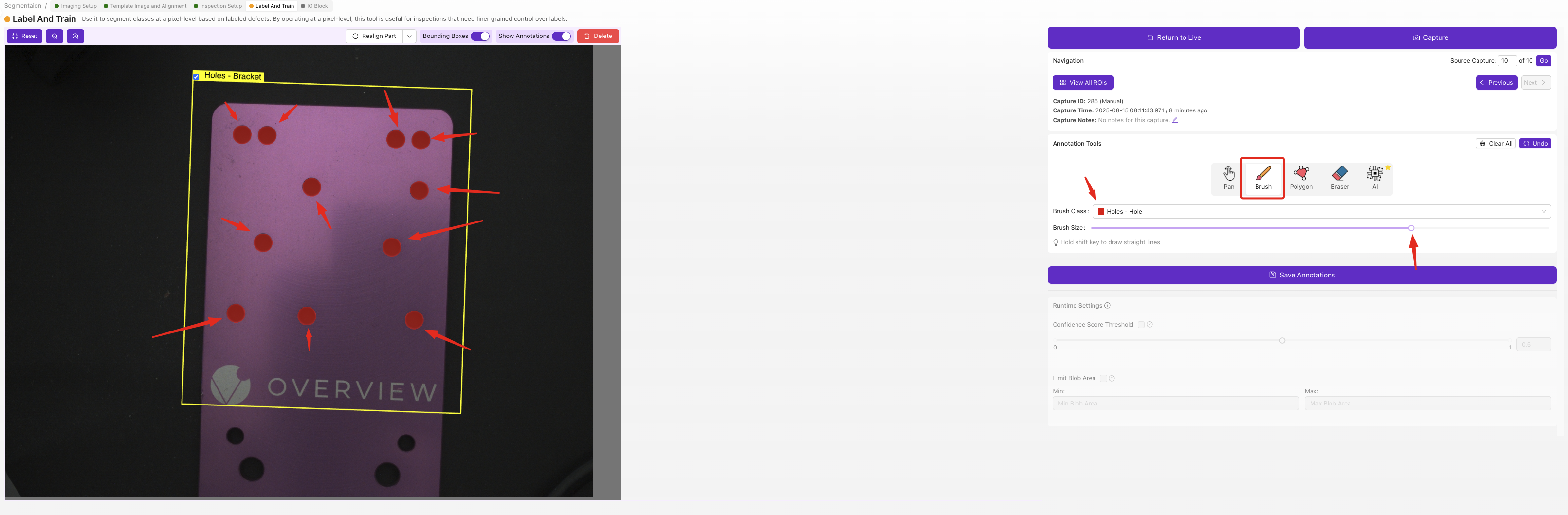
对于每张图像中的每个 ROI,使用画笔工具逐像素绘制缺陷区域。绘制的区域就是 AI 学习检测的内容 — 您未绘制的任何部分都将被视为背景。
分割器标签需要像素级的绘制工作,比分类器下拉选择慢,但可以为您提供具有位置和形状的精确缺陷图。从一小组明确定义的缺陷开始,只有在第一个模型工作正常后才添加更多类别。
4. 训练模型
- Classifier
- Segmenter
点击 训练。分类器提供两种训练模式:
- Fast mode — 大约 30 秒到 1 分钟。最适合在设置过程中快速迭代、检查标签合理性,以及处理简单/区分度高的部件。准确度低于生产模式,但可以让您快速看到信号。
- Production mode — 耗时较长,但生成的模型准确度明显更高。在部署到产线之前,请始终使用 Production 模式。对于复杂的部件、难以区分的缺陷,或任何您要在生产中信赖的内容,Production 模式才是正确的选择。
良好的节奏:在清理标签和添加数据时使用 Fast 模式进行迭代,结果看起来不错时运行 Production 模式 — 然后在部署之前再运行一次。
点击 训练。分割只有一种训练模式 — Production — 因为像素级掩码需要更彻底的训练过程才能可靠。训练时间随图像数量和您已标注的 ROI 数量而增加,因此较小的初始集(每类 10-15 张图像)几分钟即可完成训练;更大的数据集需要更长时间。
这里没有 "fast" 合理性检查选项,因此在训练前请确保您的标签是干净的(使用 View All ROIs 来检查每个掩码)。
分割器只学习它们所见过的缺陷的大小和纹理。如果您的训练集中只有小型污染物,然后生产中出现了同一缺陷类别的大块,模型将只勾勒出大缺陷中与小样本相似的部分 — 而其余大部分则未被覆盖。生成的掩码看起来呈斑块状,或仅标记真实缺陷的边缘和角落。
修复方法: 在训练样本中包含产线上预期出现的缺陷尺寸的全部范围。在小样本旁边加上几张大型污染物的捕获通常就足够了。同样的原则也适用于纹理和颜色的变化 — 训练时要涵盖您将会看到的多样性。
没有大缺陷样本? 使用 Defect Creator Studio 生成同一缺陷在不同尺寸、位置和方向下的合成训练图像 — 无需等待真实的大型污染物从产线上经过。
5. 使用实时预览进行测试
点击 实时预览模式 并运行零件。观察结果:
- 它对简单案例的判断是否正确?
- 它在哪些地方表现欠佳?
- 哪些是临界案例?
尝试让它失败。 找出它判断失败的案例。这些失败案例是您改进的路线图。
- Classifier
- Segmenter

测试面板显示每个 ROI 的预测 类别 和 置信度分数。运行几次捕获,并查找低置信度判定(通常低于 70%)——这些是您的临界案例,也是最值得接下来进行标注的零件。
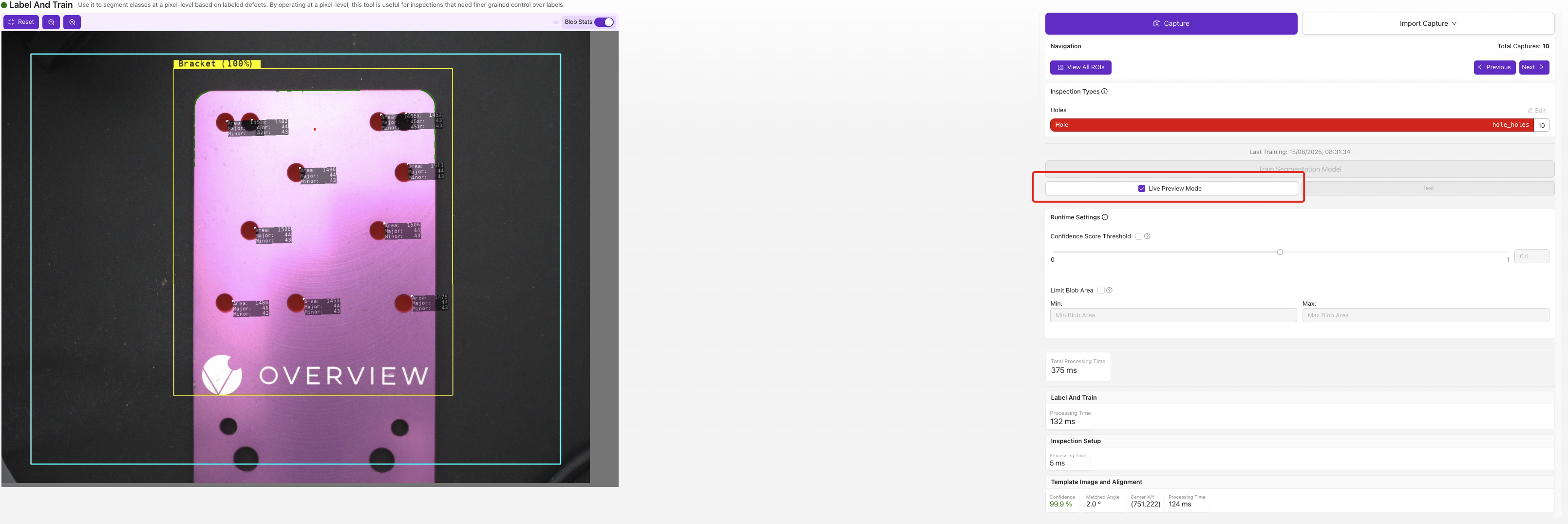
实时预览将预测的缺陷掩膜直接叠加在图像上。注意那些过小、过大或出现在实际没有缺陷位置的掩膜——这些是您在下一轮标注数据中需要针对的失败模式。
6. 添加针对性数据
不要随意添加新图像。添加专门针对您发现的失败模式的图像:
- 如果它将划痕与反光混淆,则添加更多这两类的示例
- 如果它遗漏小缺陷,则添加更多小缺陷的图像
- 如果它对角落里的零件判断失败,则添加更多角落示例
7. 重新训练并重新测试
重复步骤 4-6 两到四次。每次迭代都应提高准确性。如需更深入的演练——包括如何在不丢失先前训练的情况下向现有模型添加新图像——请参阅 添加数据与重新训练。
数据增强:教 AI 处理变化
数据增强会在训练过程中随机修改您的训练图像——调整亮度、添加旋转、微调对比度等。每张图像都会以略有不同的数据增强方式被送入 AI 数百次,但标签保持不变。这就是让模型在无需捕获每种可能变化示例的情况下,仍能适应真实世界条件的方法。
默认应开启的项
少量的 亮度 变化几乎总是值得开启的——即使是最严格控制的工厂也会有顶灯闪烁、班次间阴影变化以及 LED 随时间出现的轻微漂移。亮度数据增强基本上可以零成本地让模型应对所有这些情况。
旋转:实用,但要注意您的 ROI 形状
如果您的零件确实可能以不同角度到达(传送带上松散的螺丝、手工放置的零件、任何未固定在夹具中的物品),旋转数据增强非常有用。但它与 ROI 形状相互影响:
- 方形 ROI: 旋转数据增强可以正常工作——旋转后的图像仍能装入 ROI 框内。
- 分类器上的非方形 ROI: 旋转可能会裁剪图像。当一个高而窄的 ROI 被旋转 45° 时,旋转后内容的角会落在框外,模型会基于不完整的图像进行训练。如果您的零件可能旋转,要么将 ROI 设为方形,要么依靠 对齐器 在上游处理旋转,这样此处就不需要旋转数据增强。
- 分割器: 同样存在裁剪问题,但分割对此不太敏感,因为它是从像素掩膜而非整个 ROI 形状中学习的。
何时不应使用特定的数据增强
通用规则:不要对你正在检测的属性进行增强。 如果你想要检测方向,旋转增强会让模型认为颠倒的零件也是"良好"的。
- 检测颜色一致性? 不要使用饱和度增强。
- 检测模糊/对焦? 不要使用运动模糊增强。
- 检测方向? 不要使用旋转增强(并且可能也不应使用对齐器)。
数据多样性很重要
你的训练数据应代表AI在生产中将看到的全部范围:
- 一天中的不同时段(如果光照有变化)
- 不同批次的零件(表面处理可能略有不同)
- 零件在画面中处于不同位置
- 容易和困难的案例都要包含
重点关注最困难的案例。 如果你的训练数据包含了最难分类的10个零件,那么剩下90%的简单零件对AI来说将轻而易举。
高学习能力
OV相机的AI设计为可随着数据增加而不断提升。与许多在20张图像后就达到瓶颈的AI系统不同,该模型在50张、100张甚至500张以上图像下仍能持续改进。大多数检测在5-10张图像下就能运行良好,但如果你面对的是复杂的多缺陷问题,请不要犹豫继续添加数据。
使用合成数据加速:Defect Studio
如果你需要为一种很少见到的缺陷进行训练怎么办?比如你必须故意拆掉的缺失螺丝、必须人为制造的划痕、每千件零件才出现一次的裂纹?等待数月才能收集到足够的样本并不现实。
OV Auto-Defect Creator Studio 位于 tools.overview.ai,正是为解决此问题而生。它能够生成照片级真实感的合成缺陷图像,比等待真实缺陷出现在生产线上快多达10,000倍。
工作原理:5个简单步骤
- 上传 一张零件的良品图像
- 标记 缺陷应出现的区域
- 描述 缺陷(使用简单英语,例如"表面有一道深划痕"或"焊点缺失")
- 生成 缺陷的多种变化(AI生成照片级真实感的结果)
- 导出 合成图像,直接加入到训练集中
为什么合成数据有效
生成的图像不仅仅是"贴上去"的伪影。它们是照片级真实感的变化,匹配你的实际光照、相机角度和零件表面。AI理解在你特定成像条件下缺陷外观的物理特性。
使用场景:
- 罕见缺陷: 针对从未(或很少)见过的失效模式进行训练
- 新产品上市: 在第一件不良品下线之前就构建好检测方案
- 边界案例: 生成临界样本以改进AI的决策边界
- 数据增强: 用合成多样性补充小型数据集
实际演示
最佳方法:先用最初的3-5张真实图像进行训练,识别AI表现不佳的地方,然后使用 Defect Studio 针对那些特定的失效模式生成有针对性的合成样本。真实数据建立基线;合成数据填补空白。
训练检查清单
在继续之前,请确认:
- 已捕获初始图像,每个类别至少 10-15 张
- 所有标签均已复核(View All ROIs)
- 已通过实时预览完成训练和测试
- 已识别失败模式并添加针对性数据
- 已完成 2-4 轮标签 → 训练 → 测试的迭代
- 结果符合预期
模型训练完成且效果良好?请进入 第 5 步:设置输出。