KI-GESTÜTZTE DOKUMENTATION
Was möchten Sie wissen?
RS-232 Kommunikationseinrichtung
Diese Seite erläutert, wie die RS-232-Kommunikation zwischen der OV80i-Kamera und externen Geräten mithilfe von Node-RED und einem seriellen Konverter hergestellt wird.
Kommunikationsübersicht
Die Kamera kann Node-RED und einen seriellen Konverter verwenden, um mit anderen Geräten über RS232 zu kommunizieren.
Systemanforderungen:
- RS485-zu-RS232 Serial Converter (Hardwarekauf erforderlich)
- Node-RED-Konfiguration
- Externes Gerät mit RS232-Port
Erforderliche Hardware
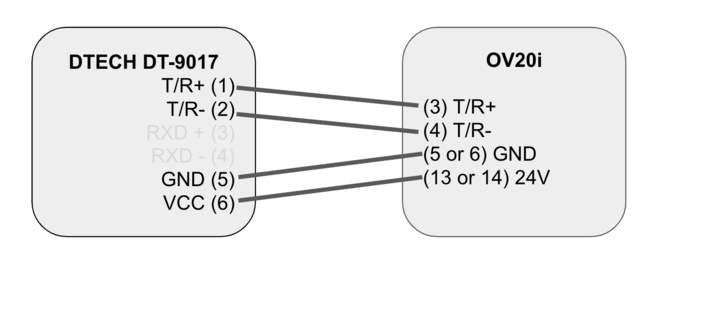
Sie müssen einen RS485-zu-RS232 Serial Converter erwerben. Wir empfehlen den DTECH DT-9017. Dieses Gerät ermöglicht die Umwandlung von RS485-Signalen, die von der Kamera stammen, in RS232.
Hardware-Spezifikationen:
- Konvertertyp: RS485-zu-RS232 Serial Converter
- Empfohlenes Modell: DTECH DT-9017
- Funktion: Wandelt RS485-Signale der Kamera in das RS232-Format um
- Bezugsquelle: Erwerb über Drittanbieter erforderlich
Einrichtung der physischen Verbindung
Schritt 1: Seriellen Konverter mit der Kamera verbinden
Verbinden Sie den seriellen Konverter mit der Kamera, wie in der Abbildung unten dargestellt.
Schritt 2: Verbindung zum RS232-Port herstellen
Verbinden Sie das andere Ende des seriellen Konverters mit dem gewünschten RS232-Port. Damit ist die physische Verbindung zwischen der Kamera und dem RS232-Port hergestellt.
Verbindungskette: OV80i Kamera → RS485-Ausgang → Serieller Konverter → RS232-Port → Externes Gerät
Node-RED-Logik konfigurieren
Navigieren Sie zum IO Block, um die Node-RED-Logik zu konfigurieren. Folgen Sie den im Abschnitt Node-RED Basics beschriebenen Schritten, um die unten bereitgestellte JSON-Datei zu importieren:
Konfigurationsschritte:
- Zugriff auf IO Block in der Kameraoberfläche
- Node-RED-Konfiguration öffnen
- Bereitgestellte JSON-Konfigurationsdatei importieren
- Aktualisierten Flow bereitstellen
Node-RED-Konfigurations-JSON
Kopieren und importieren Sie die folgende JSON-Konfiguration, um die RS-232-Kommunikation einzurichten:
[
{
"id": "7cb1ab03670cd840",
"type": "tab",
"label": "Flow 1",
"disabled": false,
"info": "",
"env": []
},
{
"id": "8aabc4c53d9cca67",
"type": "ui_group",
"name": "Home",
"tab": "51b1608995f5ea89",
"order": 1,
"disp": true,
"width": "27",
"collapse": false
},
{
"id": "51b1608995f5ea89",
"type": "ui_tab",
"name": "Home",
"icon": "dashboard",
"disabled": false,
"hidden": false
},
{
"id": "42dd086612a76167",
"type": "ui_base",
"theme": {
"name": "theme-light",
"lightTheme": {
"default": "#0094CE",
"baseColor": "#0094CE",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif",
"edited": false
},
"darkTheme": {
"default": "#097479",
"baseColor": "#097479",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif",
"edited": false
},
"customTheme": {
"name": "Untitled Theme 1",
"default": "#4B7930",
"baseColor": "#4B7930",
"baseFont": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif"
},
"themeState": {
"base-color": {
"default": "#0094CE",
"value": "#0094CE",
"edited": false
},
"page-titlebar-backgroundColor": {
"value": "#0094CE",
"edited": false
},
"page-backgroundColor": {
"value": "#fafafa",
"edited": false
},
"page-sidebar-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"group-textColor": {
"value": "#1bbfff",
"edited": false
},
"group-borderColor": {
"value": "#ffffff",
"edited": false
},
"group-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"widget-textColor": {
"value": "#111111",
"edited": false
},
"widget-backgroundColor": {
"value": "#0094ce",
"edited": false
},
"widget-borderColor": {
"value": "#ffffff",
"edited": false
},
"base-font": {
"value": "-apple-system,BlinkMacSystemFont,Segoe UI,Roboto,Oxygen-Sans,Ubuntu,Cantarell,Helvetica Neue,sans-serif"
}
},
"angularTheme": {
"primary": "indigo",
"accents": "blue",
"warn": "red",
"background": "grey",
"palette": "light"
}
},
"site": {
"name": "Node-RED Dashboard",
"hideToolbar": "false",
"allowSwipe": "false",
"lockMenu": "false",
"allowTempTheme": "true",
"dateFormat": "DD/MM/YYYY",
"sizes": {
"sx": 48,
"sy": 48,
"gx": 6,
"gy": 6,
"cx": 6,
"cy": 6,
"px": 0,
"py": 0
}
}
},
{
"id": "c47cc2d81c408a36",
"type": "serial-port",
"name": "",
"serialport": "/dev/ttyTHS1",
"serialbaud": "9600",
"databits": "8",
"parity": "none",
"stopbits": "1",
"waitfor": "",
"dtr": "high",
"rts": "low",
"cts": "high",
"dsr": "high",
"newline": "\\\\n",
"bin": "false",
"out": "char",
"addchar": "\\\\n",
"responsetimeout": "10000"
},
{
"id": "2baab5bd0cce1230",
"type": "debug",
"z": "7cb1ab03670cd840",
"name": "debug 1",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 580,
"y": 580,
"wires": []
},
{
"id": "4e7d748dce95e6c6",
"type": "change",
"z": "7cb1ab03670cd840",
"name": "set rts high",
"rules": [
{
"p": "payload",
"t": "set",
"pt": "msg",
"to": "{\\"rts\\": \\"high\\"}",
"tot": "json"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 630,
"y": 400,
"wires": [
[
"8e62d87d6be5a946"
]
]
},
{
"id": "e3b7598d774c2bd6",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "delay",
"timeout": "20",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 630,
"y": 320,
"wires": [
[
"270a4fa8fb4a4978",
"5325a871a1f84955"
]
]
},
{
"id": "104dae3badcde04b",
"type": "change",
"z": "7cb1ab03670cd840",
"name": "set rts low",
"rules": [
{
"p": "payload",
"t": "set",
"pt": "msg",
"to": "{\\"rts\\": \\"low\\"}",
"tot": "json"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 630,
"y": 360,
"wires": [
[
"8e62d87d6be5a946"
]
]
},
{
"id": "651284218146186a",
"type": "inject",
"z": "7cb1ab03670cd840",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "GOOD",
"payloadType": "str",
"x": 250,
"y": 360,
"wires": [
[
"342f2ea893daee9b"
]
]
},
{
"id": "270a4fa8fb4a4978",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "delay",
"timeout": "20",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 830,
"y": 360,
"wires": [
[
"104dae3badcde04b"
]
]
},
{
"id": "17d922879e91c8a7",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "rate",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "0.5",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": true,
"allowrate": false,
"outputs": 1,
"x": 420,
"y": 580,
"wires": [
[
"2baab5bd0cce1230"
]
]
},
{
"id": "342f2ea893daee9b",
"type": "delay",
"z": "7cb1ab03670cd840",
"name": "",
"pauseType": "rate",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "0.5",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": true,
"allowrate": false,
"outputs": 1,
"x": 430,
"y": 320,
"wires": [
[
"e3b7598d774c2bd6",
"4e7d748dce95e6c6"
]
]
},
{
"id": "54165e10b820a5f5",
"type": "inject",
"z": "7cb1ab03670cd840",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "FAIL",
"payloadType": "str",
"x": 250,
"y": 300,
"wires": [
[
"342f2ea893daee9b"
]
]
},
{
"id": "2549782ab378b378",
"type": "serial in",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 260,
"y": 580,
"wires": [
[
"17d922879e91c8a7"
]
]
},
{
"id": "5325a871a1f84955",
"type": "serial out",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 820,
"y": 320,
"wires": []
},
{
"id": "8e62d87d6be5a946",
"type": "serial control",
"z": "7cb1ab03670cd840",
"name": "",
"serial": "c47cc2d81c408a36",
"x": 830,
"y": 400,
"wires": [
[]
]
},
{
"id": "263de9e9ed71a09e",
"type": "comment",
"z": "7cb1ab03670cd840",
"name": "Send any string here to pass it to the selected serial port. The rest of the nodes just manage information flow.",
"info": "",
"x": 550,
"y": 240,
"wires": []
},
{
"id": "15d30e67047b53fc",
"type": "comment",
"z": "7cb1ab03670cd840",
"name": "Receive strings here.",
"info": "",
"x": 280,
"y": 520,
"wires": []
}
]
- Port:
/dev/ttyTHS1 - Baudrate: 9600
- Datenbits: 8
- Parität: Keine
- Stoppbits: 1
- Flusssteuerung: RTS/CTS über Flow-Logik verwaltet
Kommunikation einrichten
Daten senden
Verwenden Sie den FAIL/GOOD-Node, um Kameraergebnisse über den RS232-Port an das empfangende Gerät zu senden.
Datenübertragung:
- Quelle: Ergebnisse der Kamerainspektion
- Methode: Ausgang des FAIL/GOOD-Nodes
- Ziel: Externes Gerät über RS232
- Inhalt: Pass/Fail-Status und Inspektionsdaten
Daten empfangen
Verwenden Sie den Debug-Node, um Daten vom RS232-Port zu empfangen und in Ihre Systemlogik zu integrieren.
Datenempfang:
- Quelle: Externes Gerät über RS232-Port
- Methode: Debug-Node zur Überwachung
- Integration: Einbindung in die Node-RED-Logik
- Verwendung: Systemsteuerung und Rückmeldung
✅ Abschluss der Einrichtung
Durch Befolgen dieser Schritte haben Sie erfolgreich die Kommunikation zwischen der Kamera und dem RS232-Port hergestellt.
Verifizierungs-Checkliste:
- ✅ Serieller Konverter korrekt mit der Kamera verbunden
- ✅ RS232-Port-Verbindung hergestellt
- ✅ Node-RED-Logik konfiguriert und bereitgestellt
- ✅ Datenübertragung getestet (Kamera zu externem Gerät)
- ✅ Datenempfang verifiziert (externes Gerät zu Kamera)
Der Integration Builder kann Node-RED-Flows für die RS-232-Kommunikation aus einer einfachen englischen Beschreibung generieren. Beschreiben Sie, was Sie benötigen (z. B. "send pass/fail results over RS-232 to an external controller") und erhalten Sie in Sekunden einen produktionsreifen Flow.