AI 驅動文件
您想了解什麼?
透過 TCP/IP 整合 Universal Robot (UR)
要將 Universal Robot (UR) 與相機系統整合,兩臺裝置必須連線到同一本地網路。通訊透過 TCP/IP 套接字建立 — 除確保兩臺裝置處於同一網路外,無需其他啟用操作。
在此設定中,通訊在機器人與相機之間以請求和響應的方式進行。相機作為伺服器,機器人作為客戶端。
典型通訊流程
-
從機器人開啟套接字。
-
從機器人向相機傳送資訊。
-
相機讀取資訊並將其轉換為所需格式(例如:字串、ASCII、位元組)。
-
相機使用該資訊執行功能,並透過 TCP 返回響應。
-
機器人等待 TCP 響應。如果在幾秒內未收到響應,機器人將在沒有響應的情況下繼續其流程。
備註
建議新增一個條件以確認資料已返回。
- 機器人關閉套接字通訊。
網路配置與防火牆
網路設定
- 確保 UR 機器人和相機連線到同一本地網路。
- 為它們分配同一子網內的 IP 地址以便於通訊。
防火牆設定
- 在兩臺裝置上配置防火牆規則,以允許透過指定埠進行 TCP/IP 通訊。
- 確認沒有網路策略阻止所需的通訊。
URScript 與套接字程式設計 - UR
資料格式
- 通訊可使用多種資料格式,例如字串、ASCII 或位元組。
- 確保兩臺裝置就資料格式達成一致,以避免通訊錯誤。
用於套接字通訊的 URScript 函式
socket_open(address, port, "socket_name"):開啟到指定地址和埠的套接字連線。socket_send_string("message", "socket_name"):透過套接字傳送字串訊息。socket_send_byte(value, "socket_name"):透過套接字傳送位元組值。socket_read_string("socket_name"):從套接字讀取字串訊息。socket_read_ascii_float(number, "socket_name"):從套接字讀取 ASCII 浮點數訊息。socket_read_byte("socket_name"):從套接字讀取位元組值。socket_close("socket_name"):關閉套接字連線。
# Open socket connection to the camera server
socket_open("192.168.0.2", 3000, "camera_socket")
# Send a string message
socket_send_string("Request Data", "camera_socket")
# Alternatively, send a byte value
socket_send_byte(42, "camera_socket") # Sends the byte value 42
# Read the response as a string
response = socket_read_string("camera_socket")
# Read the response as a byte
response_byte = socket_read_byte("camera_socket")
# Close the socket connection
socket_close("camera_socket")
作為 TCP/IP 伺服器的配置 - OV10i
伺服器設定
- 配置相機在特定埠(例如埠 3000)上監聽傳入的 TCP 連線。
- 確保相機的 IP 地址為靜態地址或為機器人所知,以實現穩定通訊。
資料解析
- 在相機上實現邏輯,用於讀取來自機器人的傳入資料。
- 根據相機功能的要求,轉換並處理資料。
- 準備並向機器人傳送相應的響應。
用於 UR 機器人整合的 Node-RED 邏輯
要使用 Node-RED 將 Universal Robot (UR) 與您的系統整合,您可以建立一個簡單的流程來處理傳入的 TCP 訊息,根據接收到的資料執行操作,並在必要時向機器人返回響應。
流程示例
以下是一個分類流程示例,其中相機將在觸發後檢查零件的完整 Pass/Fail 條件,並將響應傳送回機器人。
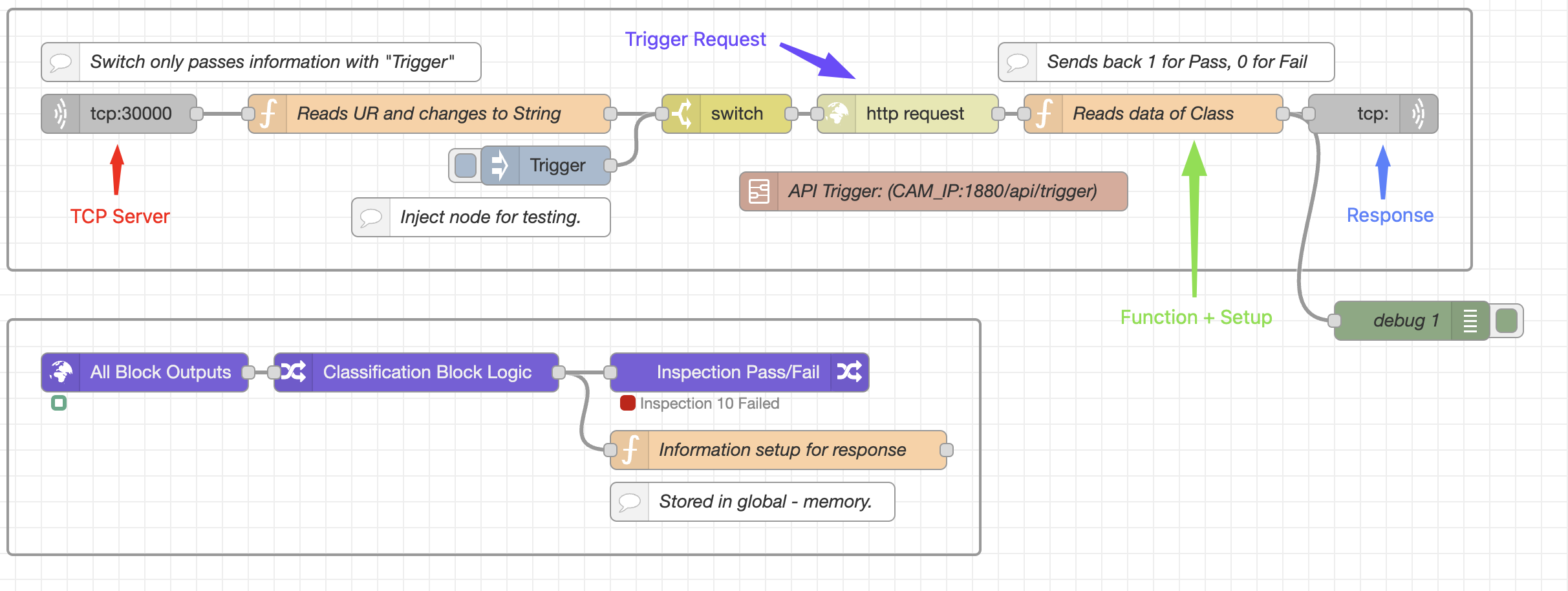
流程 1:
- TCP IN:在 Node-RED 中的埠 30000 上開啟一個 TCP 伺服器。
- Function 1 (Reads UR):將來自 UR 機器人的傳入資料轉換為字串。要使此流程正常工作,UR 必須傳送字串 "Trigger"。
- Switch:如果字串為 "Trigger",則流程繼續;如果為其他內容,則流程停止,UR 機器人將出現超時。
- HTTP Request:向端點 (API Trigger) 傳送請求以啟用相機觸發器。
- Function 2 (Read Data):從全域性記憶體中檢索資料(1 或 0),並將其格式化為正確的格式以便在 UR 機器人上進行 ASCII 讀取。
- TCP Response:將資訊傳送回機器人。
流程 2:
- Trigger Command:此流程以觸發命令開始。
- All Block Outputs:從最近拍攝的影象(在流程 1 中觸發)生成資訊。
- Classification Block Logic:為每個 ROI (Region of Interest) 設定條件以確定 Pass 或 Fail 狀態。(點選該模型進行設定。)
- Function 3 (Information Setup):將 Pass/Fail 條件轉換為 1 或 0,並儲存在全域性記憶體中,以便於轉換到 UR 機器人。
注意事項
- 流程連續性: 確保處理傳入資料的所有節點在同一流程中順序連線。如果流程拆分為並行路徑,TCP Response 可能無法正常工作。
- 無響應場景: 如果不需要響應,可以省略 TCP Response 節點。機器人應配置為能夠處理在特定超時時間內未收到響應的情況。
錯誤處理與健壯性
超時與重試
- 為套接字操作實現超時機制,以防止機器人無限期等待。
- 包含重試機制以應對臨時的網路問題。