AI 驅動文件
您想了解什麼?
使用 PLC 觸發
概述
本指南說明如何透過 Ethernet/IP 從 PLC 觸發 OV10i 攝像頭、監控其狀態並處理錯誤。此整合可確保在自動化流程中可靠地捕獲影象。
先決條件
- OV10i 攝像頭已連線到 PLC(參見 連線到 PLC (Ethernet/IP, PROFINET))。
- PLC 程式設計軟體(例如 Studio 5000)。
- 在程式的影象設定中選擇 PLC Trigger 作為觸發設定
備註
如果未在程式中選擇 PLC Trigger,攝像頭將忽略 PLC 觸發請求。
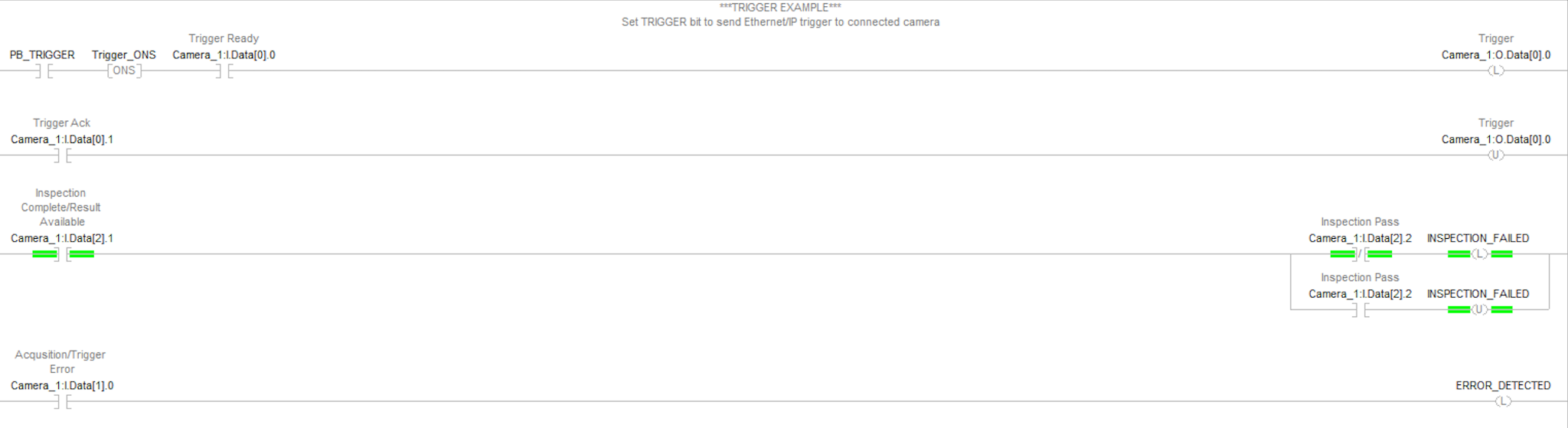
邏輯示例
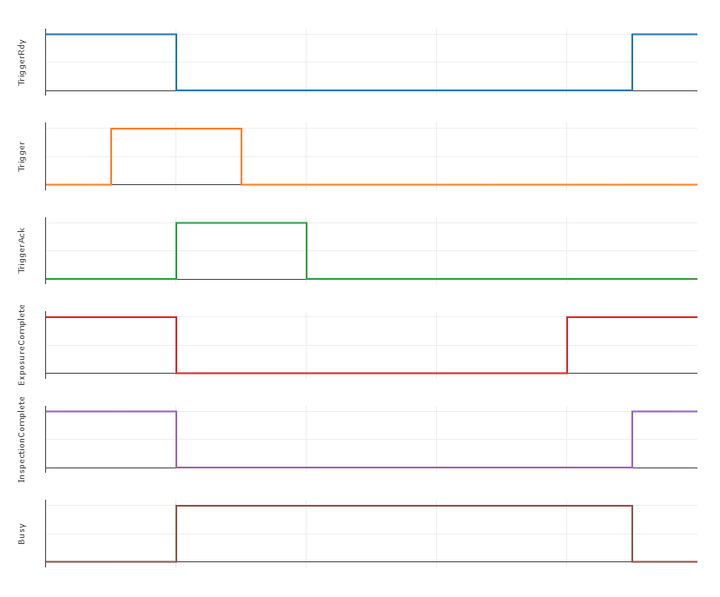
時序圖
核心概念
觸發攝像頭
- PB_TRIGGER:來自 PLC 邏輯的按鈕或控制訊號,用於啟動捕獲。
- Trigger_ONS:單次觸發器,在 PB_TRIGGER 的上升沿生成單個脈衝,防止重複觸發。
- Camera_1:I.Data[0].0:Camera Ready — 觸發前必須為高電平。
- Camera_1:O.Data[0].0:Trigger Request — 鎖存為高電平直到被確認。
- Camera_1:I.Data[0].1:Trigger Acknowledge — 確認攝像頭已接收觸發。
觸發序列
-
確認
Camera_1:I.Data[0].0(Ready)為高電平。 -
啟用
PB_TRIGGER。 -
Trigger_ONS脈衝並將Camera_1:O.Data[0].0(Trigger Request)置為高電平。 -
攝像頭響應,將
I.Data[0].1(Trigger Acknowledge)置為高電平。 -
PLC 解鎖
O.Data[0.0]以完成觸發週期。
結果可用性與狀態
- Camera_1:I.Data[2].1:Result Available — 影象處理完成後為高電平。
- Camera_1:I.Data[2].2:Pass/Fail Result — 高電平 = 透過,低電平 = 失敗。
錯誤處理
- Camera_1:I.Data[1].0:Trigger Error — 觸發過程中發生錯誤時為高電平。
- 該位會鎖存直到被複位。
- 實現 PLC 邏輯以復位此位並適當處理錯誤。
最佳實踐
- 在發出觸發訊號之前,始終檢查
Camera Ready (I.Data[0].0)。 - 使用單次觸發邏輯(
Trigger_ONS)以避免多次意外觸發。 - 鎖存 Trigger Request,直到收到確認。
- 在讀取 Pass/Fail 狀態之前監控結果可用性。
- 實施健全的錯誤處理機制,以檢測並清除故障。
關鍵訊號摘要
| 訊號 | 功能 | 備註 |
|---|---|---|
PB_TRIGGER | 啟動攝像頭觸發 | 來自 PLC 邏輯 |
Trigger_ONS | 單次觸發脈衝 | 防止重複觸發 |
I.Data[0].0 | Camera Ready | 必須為高電平才能允許觸發 |
O.Data[0].0 | Trigger Request | 鎖存直到被確認 |
I.Data[0].1 | Trigger Acknowledge | 確認已收到觸發 |
I.Data[2].1 | Result Available | 影象已處理 |
I.Data[2].2 | Pass/Fail Result | 高電平 = 透過,低電平 = 失敗 |
I.Data[1].0 | Trigger Error | 鎖存直到被清除 |
結論
透過實施此邏輯,OV10i 攝像頭可以使用 PLC 控制進行可靠的觸發和監控,確保與工業自動化流程的精確同步。