AI 驅動文件
您想了解什麼?
從 PLC 向相機傳送自定義資料
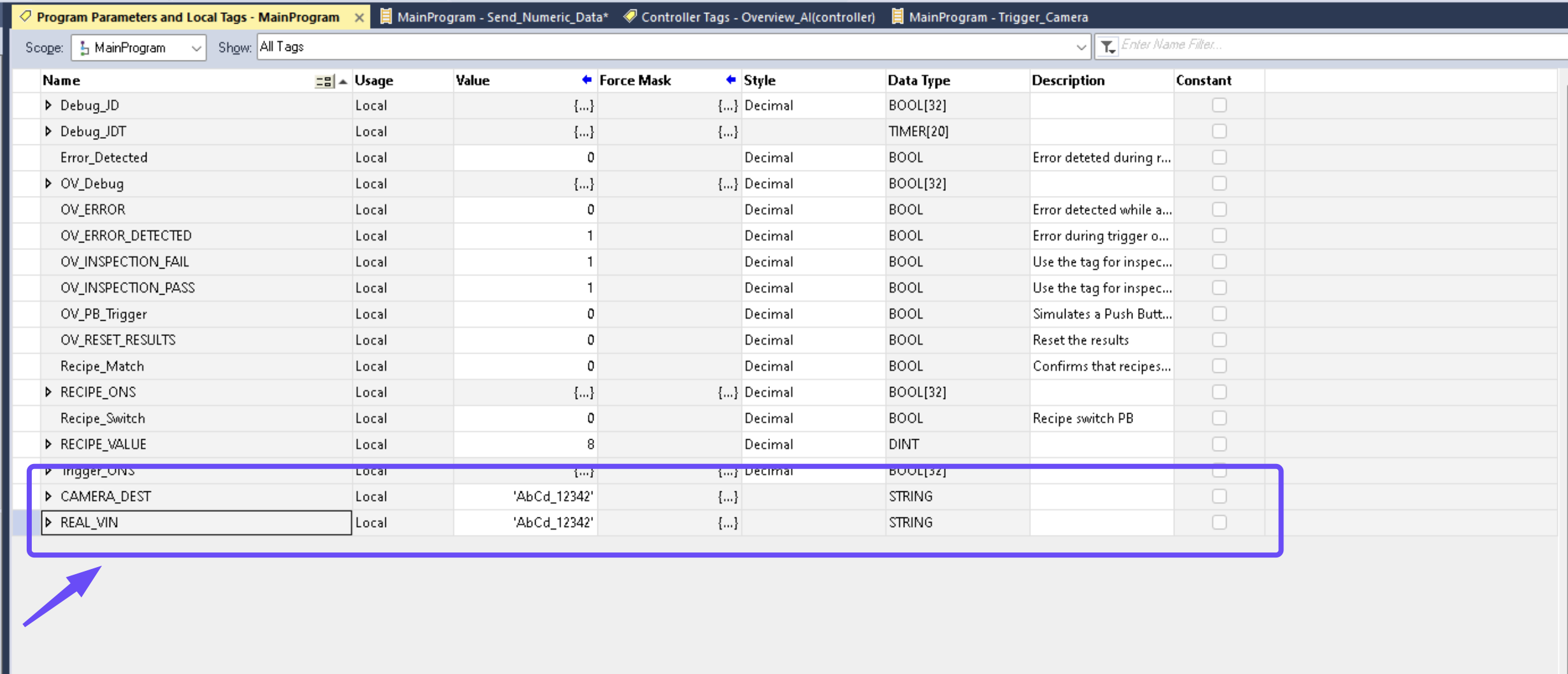
第一步:建立並配置自定義資料標籤
首先建立兩個標籤,一個用於從自定義資料標籤複製資料,另一個用於將資料傳遞到相機輸出標籤。兩者都必須是 STRING 資料型別。
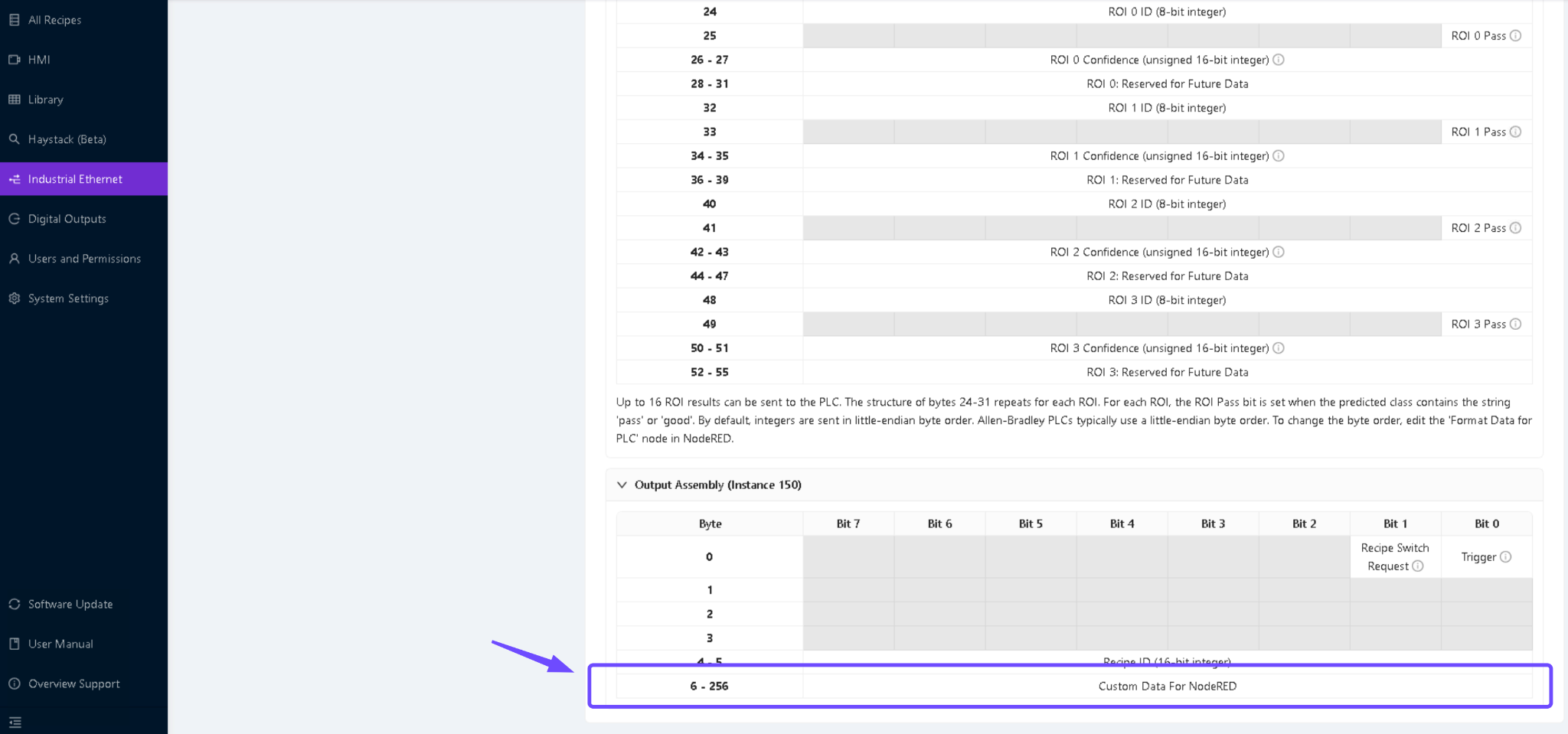
第二步:為 Node-RED 定義位元組順序
您可以從分配給 Node-RED 的輸出程式集中選擇任意位元組順序。位元組順序指的是資料的格式化和傳輸方式。
第三步:開發觸發邏輯
建立自定義資料標籤後,使用 Trigger Using a PLC 中詳述的觸發邏輯來建立一組新的邏輯指令。該觸發邏輯應處理相機的啟用,確保在滿足特定條件時捕獲影象。

備註
如果對同一 VIN 觸發兩次,第二張影象將不會儲存資料。請在傳送新資料之前先清除舊資料。
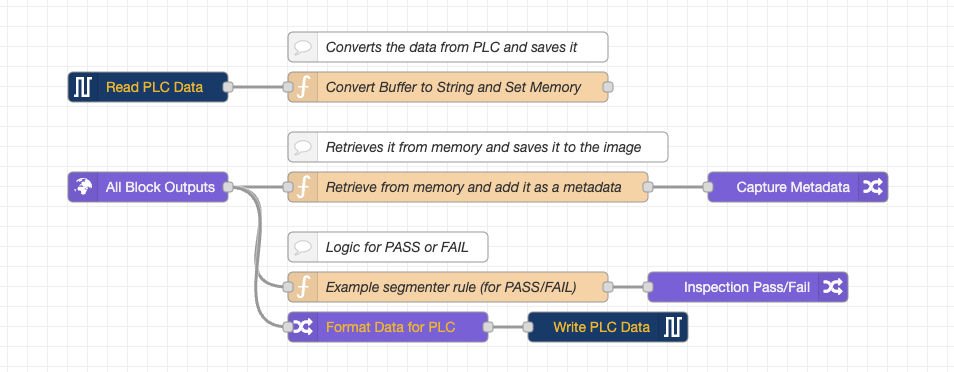
第四步:在 Node-RED 中建立流程
訪問 Node-RED 流程,建立一個能夠實現所需功能的新流程。
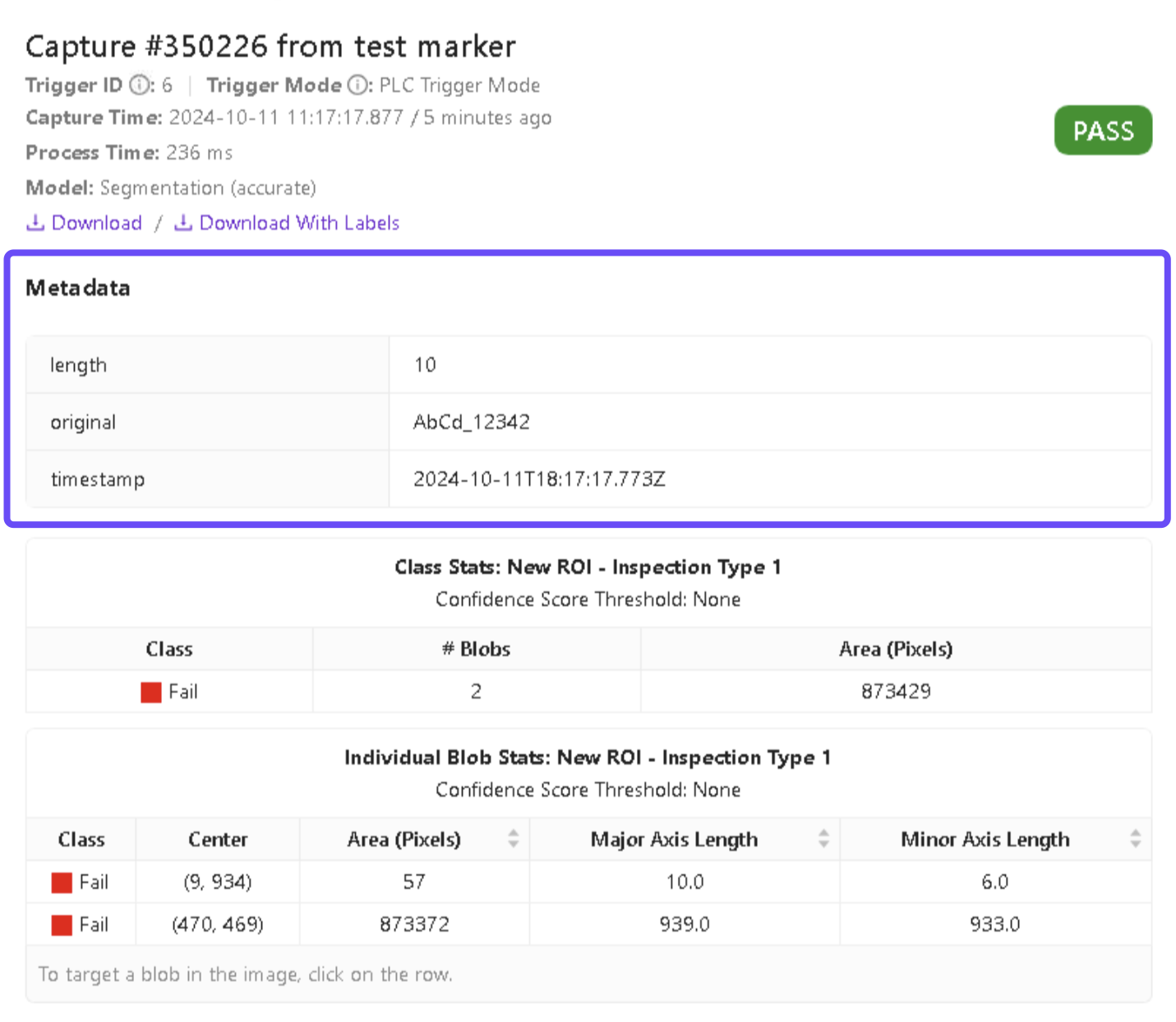
第五步:捕獲影象並關聯後設資料
觸發相機後,驗證影象捕獲過程是否按預期工作。
確保相機拍攝的每張影象都附帶後設資料,包括自定義資料。