AI 驅動文件
您想了解什麼?
第 5 步:設定輸出
您的 AI 模型已訓練完成。現在需要決定相機如何處理每個透過/失敗結果,以及將結果傳送到何處。
需要回答兩個問題:
- 如何計算透過/失敗? 基本模式(規則)或高階模式(Node-RED)。
- 結果傳送到何處? 獨立執行(僅相機 UI)、傳送到 PLC,或傳送到物理數字輸出。
這兩個問題相互獨立。請在下方選擇您所需的場景,找到對應的模式 + 目的地組合,然後詳細閱讀相關章節。
What are you trying to do?
Pick your scenario — see exactly which mode and destination you need
The page below covers everything in detail. This picker is a shortcut to the right combination for your line.
Operators read pass/fail from the screen. No PLC, no external wiring beyond power and Ethernet to a laptop or HMI.
What to do
- Configure pass/fail rules in the IO Block (Basic mode).
- Done — results show on Live Preview and saved captures.
OV20i Web 介面在 v2026.5 中進行了重新設計。請在相機 UI 的右上角檢視您的軟體版本,並選擇對應的選項卡。您的選擇將貫穿此設定流程的每個頁面。
- 較舊版本
- v2026.5 及更新版本
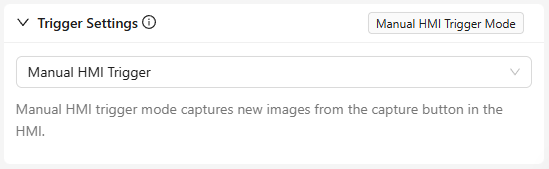
在較舊的介面中,觸發設定和 IO模組在此輸出步驟中合併顯示。您在同一介面上選擇觸發模式並設定透過/失敗邏輯。
觸發
從 Trigger Settings 下拉選單中選擇捕獲的觸發方式(Manual、Hardware、PLC、Aligner 或 Interval)。
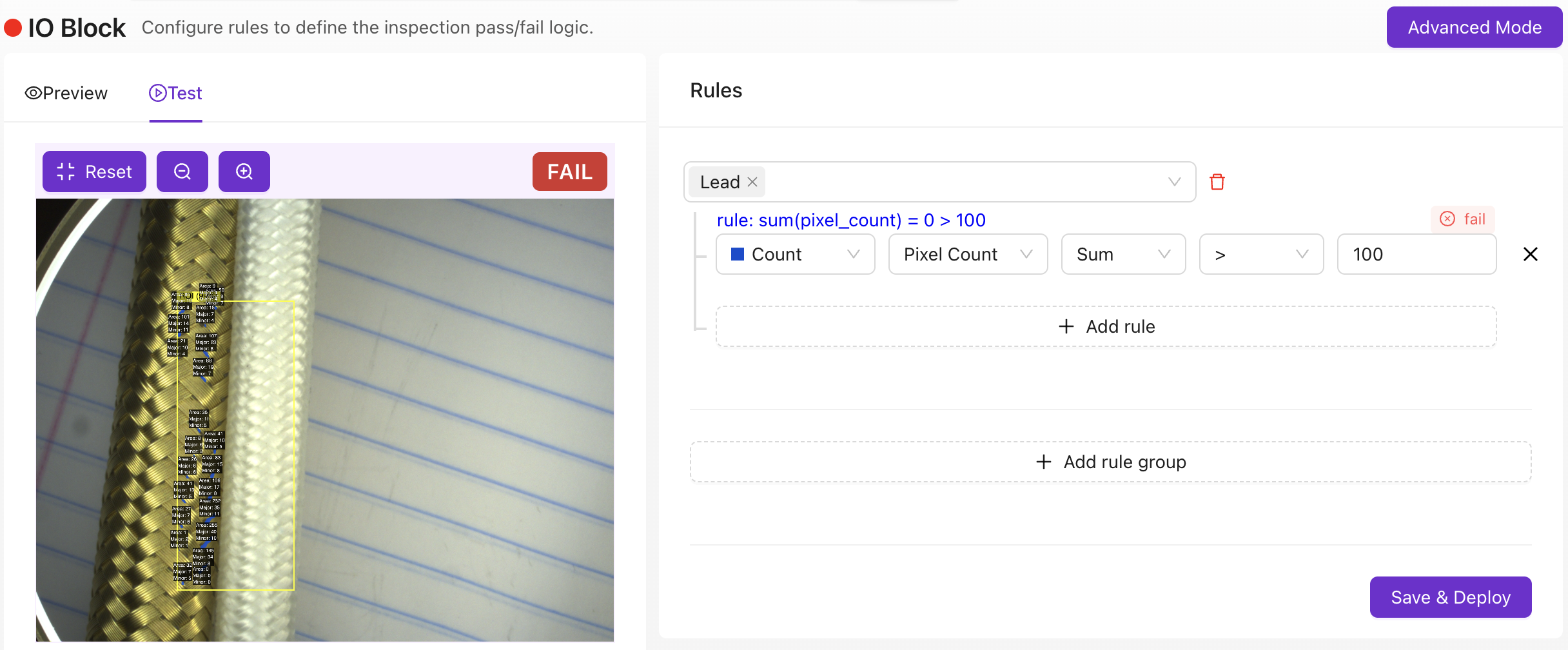
IO模組(基本模式)
為每個 ROI 新增規則(例如,類別必須等於 "pass",或畫素數小於 N),並將其組合為整體透過/失敗結果。如需超出 per-ROI 規則的功能,請點選 Advanced Mode 開啟 Node-RED。
本頁其餘部分中的概念(邏輯模式、輸出目的地、PLC 整合、觸發模式和部署)均適用於此介面。
此階段分為兩個步驟:第 5 步:觸發和第 6 步:IO模組。
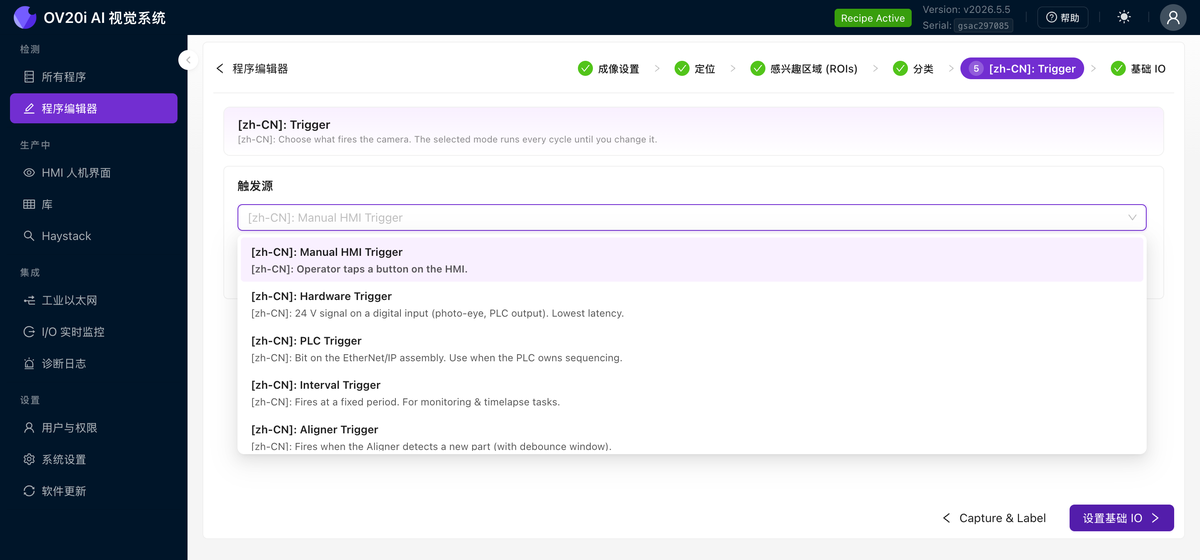
第 5 步:觸發
在程式編輯器中,開啟第 5 步:觸發,從 Trigger source 下拉選單中選擇觸發相機的方式。每種模式都有自身的說明,所選模式的相關引數會直接顯示在下拉選單下方。
| 觸發源 | 觸發條件 | 最適合 |
|---|---|---|
| Manual HMI Trigger | 操作員在 HMI 上點選按鈕 | 測試和設定(無引數) |
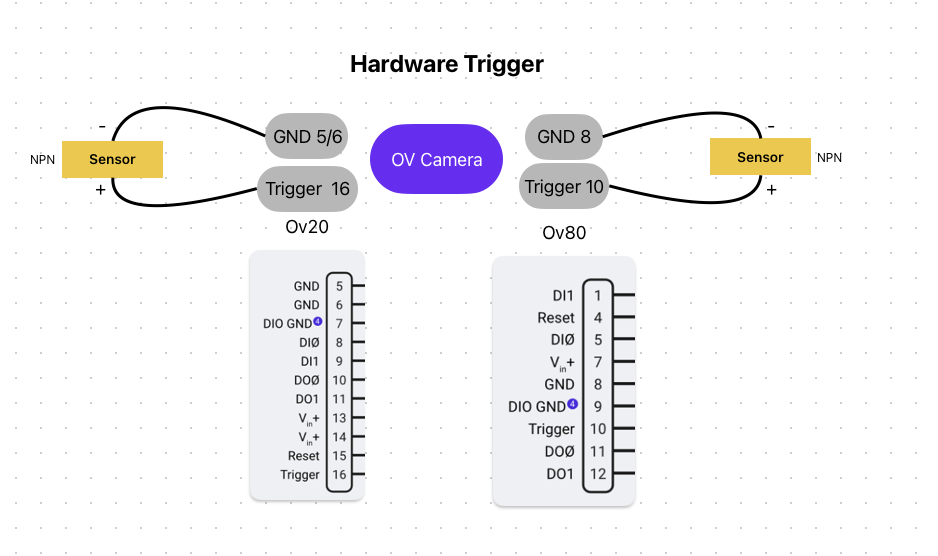
| Hardware Trigger | 24 V 訊號到達數字輸入(光電感測器、PLC 輸出) | 自動化生產線上的最低延遲 |
| PLC Trigger | EtherNet/IP 組裝上的某個位發生翻轉 | PLC 負責時序控制時 |
| Interval Trigger | 經過固定時間間隔 | 監控和延時拍攝任務 |
| Aligner Trigger | 對齊器檢測到新部件(帶防抖視窗) | 部件到達時間不可預測 |
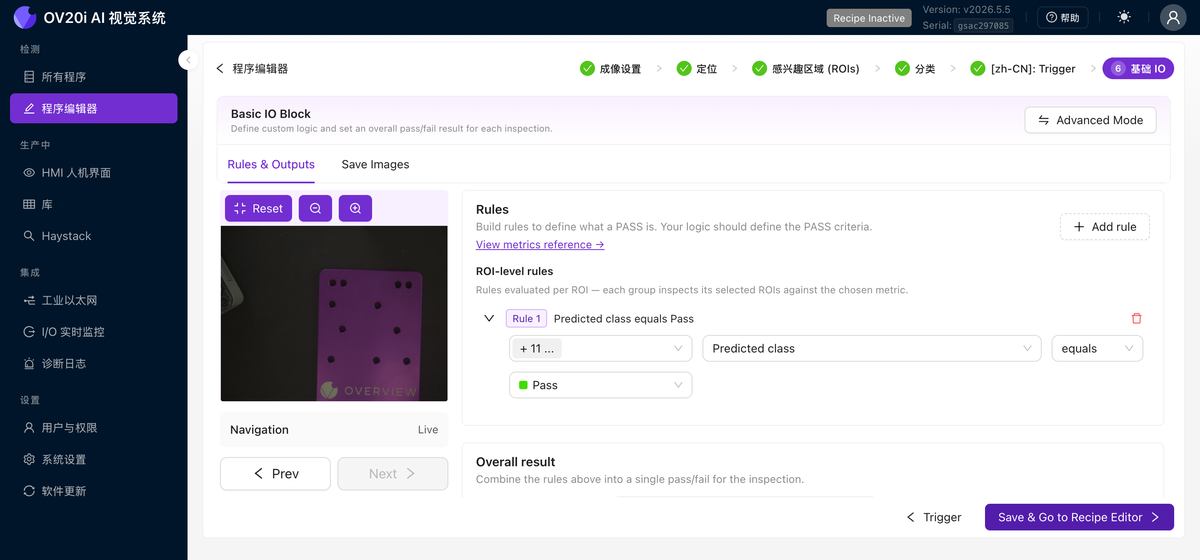
第 6 步:IO模組
IO模組用於為已訓練模型分配透過/失敗規則和邏輯,然後將該結果輸出到相機外部、PLC 或生產線的下一步驟。它預設開啟為基本模式。標題欄包含一個儲存操作、一個切換到高階模式按鈕(該按鈕會將整個模組替換為 Node-RED 編輯器),以及兩個選項卡:規則與輸出和儲存影象。
規則的形式取決於您的模型型別,請在下方選擇對應的選項卡。(此切換與第 4 步上的切換保持同步。)
- 分類器
- 分割器
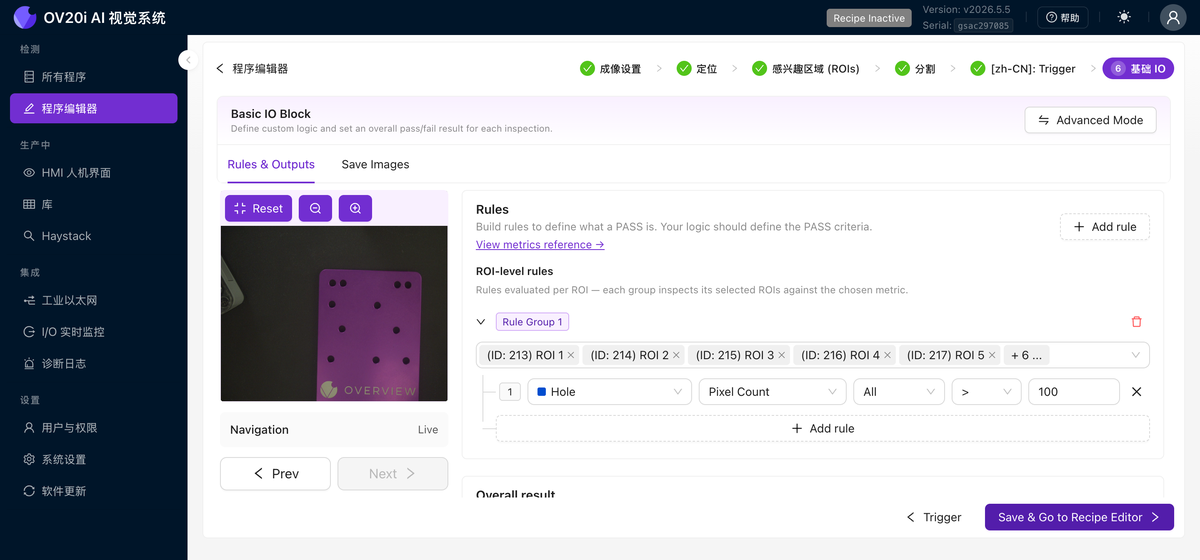
規則。 規則定義了什麼算作 PASS。點選新增規則以新增一條規則。每條 ROI 級規則從左到右閱讀,包含四個部分:
- 規則覆蓋哪些 ROI。 開啟選擇器選擇一個檢測型別,它會一次選中其所有 ROI(例如顯示為 "+ 11 ..."),或深入選擇特定的 ROI。
- 指標。 Predicted class 或 Confidence。
- 運算子。 對於類別:equals、not equals、contains 或 doesn't contain。對於置信度:與閾值進行數值比較。
- 值。 例如,
Predicted classequalsPass。
對於分割器,沒有單一的 per-ROI 類別可供測試,因此規則改為對模型生成的缺陷掩碼設定閾值。規則按規則組進行組織(每個組共同評估一組 ROI),新增規則會構建一個從左到右閱讀的五部分規則:
- 類別。 規則關注的分割類別,例如 Hole。
- 指標。 該類別 blob 的幾何測量。該下拉選單(也位於檢視指標參考下方)涵蓋 Pixel Count、Perimeter、Major Axis Length、Minor Axis Length、Center X / Y、Centroid X / Y 和 Angle,每項均有 Global 變體,該變體在完整影象座標中而非 ROI 內進行測量。
- 聚合。 該指標在所有檢測到的 blob 上的組合方式:Any、All、None、Highest、Lowest 或 Sum。
- 運算子。 數值比較:大於、小於、等於等。
- 值。 用於比較的閾值。
完整閱讀時,類似 Hole / Pixel Count / All / > / 100 的規則表示"如果所有檢測到的 Hole blob 都大於 100 畫素,則失敗。"這就是讓分割器能夠基於缺陷的大小、形狀、數量或位置而不僅僅是其存在與否來判定部件失敗的方式。
測試與參考控制元件。 規則列表旁邊有幾個輔助工具:
- 檢視指標參考列出了您可以用於構建規則的每個欄位。
- 捕獲並測試規則抓取一幀並顯示您的規則如何針對實時捕獲進行評估。
- 上一個 / 下一個逐幀瀏覽捕獲,以便您在部署前對邏輯進行合理性檢查。
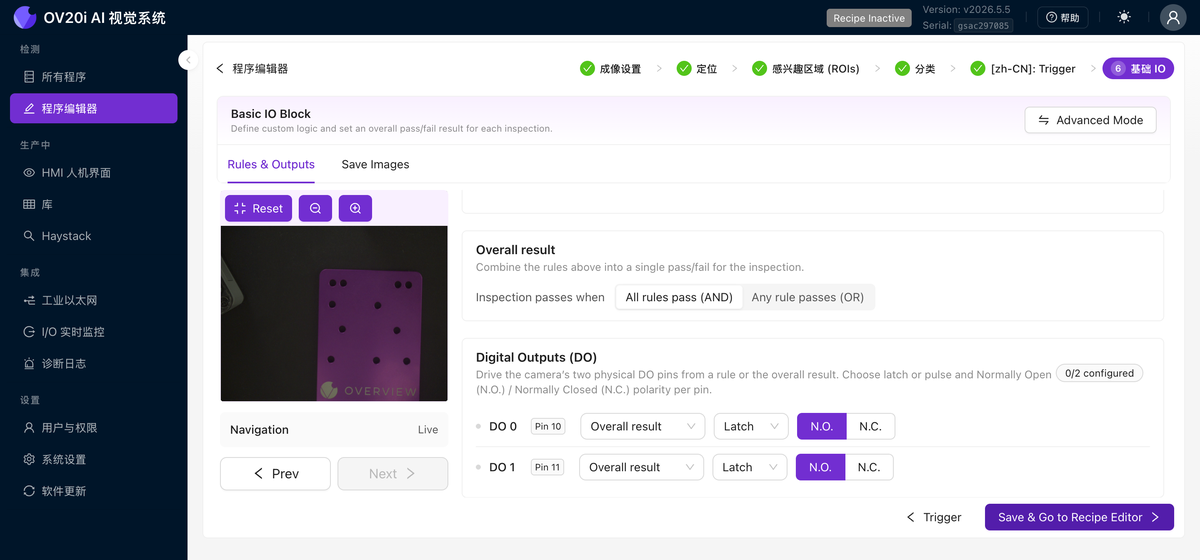
整體結果。 將您的規則組合為相機報告的單一透過/失敗結果。選擇所有規則透過 (AND) 或任一規則透過 (OR)。這個全域性透過/失敗結果將傳遞到 PLC、HMI 和數字輸出。
Digital Outputs (DO)。 直接從基本 IO模組驅動相機的兩個物理輸出引腳,無需 Node-RED。狀態行顯示兩個引腳中已配置的數量。對於每個引腳,DO0 (pin 10) 和 DO1 (pin 11),需設定三項:
- 來源。 即整體結果,或特定規則。
- 行為。 鎖存保持狀態直到下一個結果;脈衝短暫觸發,適合一次性剔除電磁閥。
- 極性。 N.O.(常開)或 N.C.(常閉)。
這就足以接線一個綠燈透過、紅燈失敗的訊號燈,或剔除閘門。
儲存影象。 儲存影象選項卡用於選擇將哪些捕獲的幀寫入庫以供後續檢視:所有檢測、僅失敗(推薦用於重新訓練)、僅透過(適用於黃金樣品審計)或無。
高階模式。 當您的邏輯超出 per-ROI 規則的範圍時,例如時間序列檢查、自定義 PLC 資料、路由到 MQTT、MES 或 FTP,或電子郵件和 Teams 警報,請點選切換到高階模式以開啟下方介紹的完整 Node-RED 編輯器。
全域性透過/失敗
每次捕獲都會產生一個單一的二元結果:透過或失敗。即使您有 50 個感興趣區域(ROI)執行復雜分析,最終也歸結為一個答案:這個部件是好是壞?
這個單一的全域性透過/失敗結果會被髮送到您的 PLC、HMI、訊號燈、剔除裝置或任何其他系統。攝像頭在每次捕獲時計算該結果;Basic 模式和 Advanced 模式之間的區別在於您如何表達產生該結果的規則。
選擇邏輯模式
Basic 模式:何時使用
當您的透過/失敗規則是各 ROI 結果的簡單組合時,使用 Basic 模式。例如:
- "所有 ROI 必須 class = 'pass' 才算全域性透過"
- "ROI 1 和 ROI 2 必須均為 'present',ROI 3 必須為 'aligned'"
- "主類的缺陷畫素數低於 N"
如果您可以用一句話加上 AND / OR / 閾值描述您的規則,Basic 模式可以處理。無需程式碼,無需流程編輯器。
設定方法: 在 IO模組 中,為每個 ROI 新增規則(例如預測 class 等於 Pass,或置信度/畫素計數閾值),然後選擇規則如何組合為整體透過/失敗(全部必須透過,或任一規則透過)。攝像頭會在每次捕獲時計算透過/失敗。有關您介面中的具體點選路徑,請按照上方版本選項卡中的 IO模組 演練操作。
在 v2026.5 及更新版本 中,Basic IO 模組將 DO0 / DO1 直接對映到規則或整體結果(第 6 步中的 Digital Outputs (DO) 部分),無需 Node-RED。在 較舊版本 中,Basic 模式僅生成 PLC 和攝像頭 UI 讀取的透過/失敗訊號;要驅動物理引腳,您需要 Advanced 模式。請參閱下方的 數字輸出 (DO0 / DO1)。
Advanced 模式:何時使用
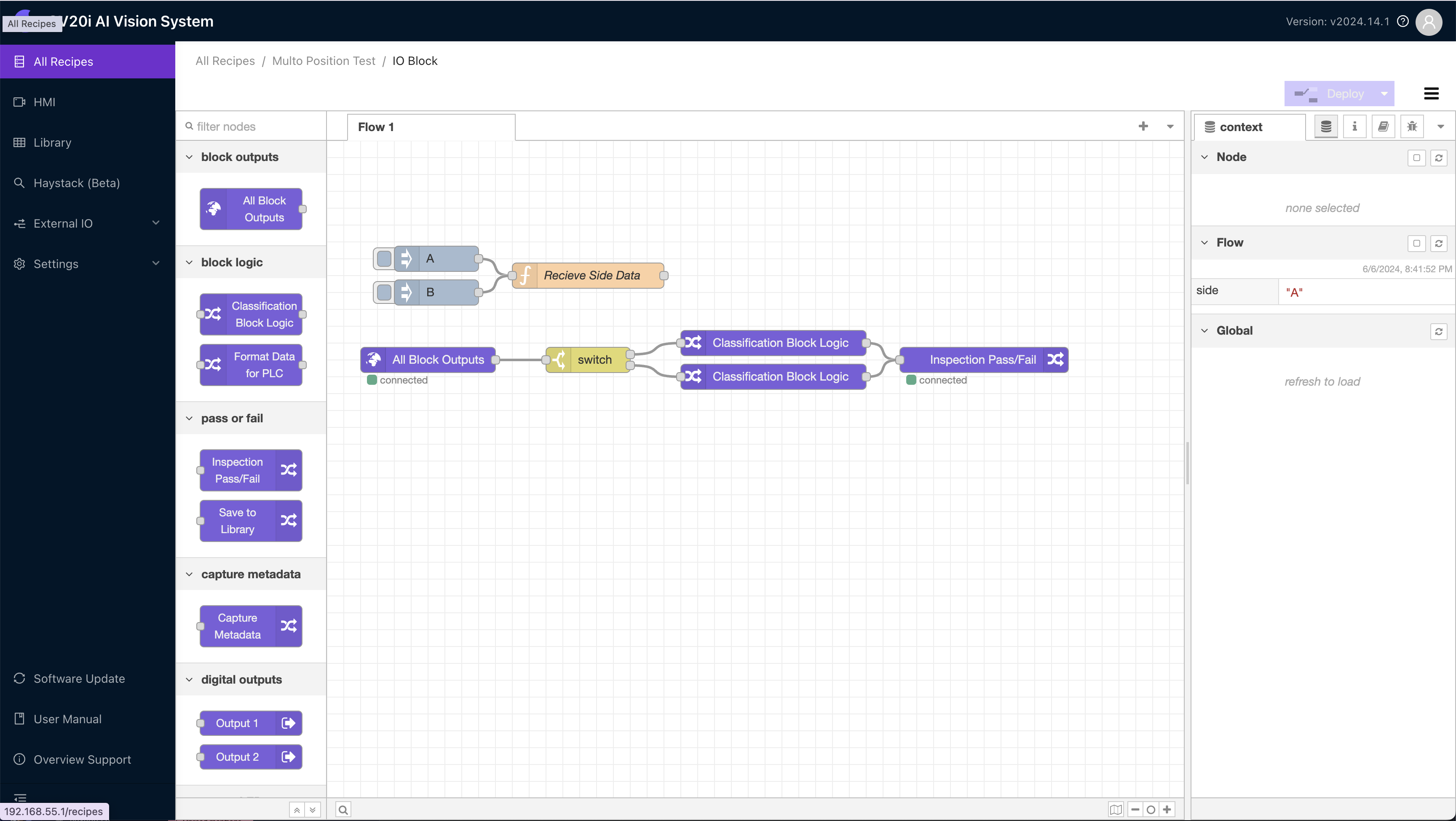
在 IO模組 中點選 Advanced Mode 進入 Node-RED,這是一個視覺化程式設計環境。
在以下情況下使用 Advanced 模式:
- 透過/失敗規則需要 超出每個 ROI 閾值 的邏輯,例如"如果總缺陷面積佔部件面積的 X%,且至少有 N 個缺陷,且平均置信度高於 80%,則失敗"
- 您需要 時序邏輯,"如果最近 10 個部件中有 7 個失敗則失敗"
- 您需要 驅動物理數字輸出(DO0 / DO1)以控制訊號燈、剔除裝置或繼電器
- 您需要 向 PLC 傳送超出標準透過/失敗 + ROI 載荷的自定義資料(例如 PROFINET
User Data - 64 bytes模組或額外的 EtherNet/IP 裝配欄位) - 您需要 將資料路由到任何外部位置,如 MQTT、MES、FTP、REST API、電子郵件、Teams、資料庫
每次捕獲都會啟動一個新流程。"All Blocks Output" 節點將捕獲的所有後設資料公開為 JSON 物件,包括 class、置信度、畫素計數、面積、ROI 名稱、時間戳,因此任何下游節點都可以基於任何欄位進行分支。
您可以構建的內容:
- 組合多個 ROI 欄位的自定義透過/失敗邏輯
- 訊號燈、剔除裝置和繼電器控制(數字輸出)
- 時序分析("我最近 10 個部件中是否有 7 個失敗?通知主管")
- 自定義儀表板:Pareto 圖、趨勢視覺化、生產指標
- 資料路由到 FTP、MES 系統、資料庫
- 將檢測結果與部件序列號關聯的條碼整合
- 條件影象儲存(例如,僅在失敗時儲存)
- 電子郵件 / Teams / Slack 通知
- 通訊協議:RS232、RS485、MQTT、HTTP/HTTPS、OPC-UA
匯入和匯出流程
您可以將 Node-RED 流程匯入和匯出為 JSON 格式。這使您能夠備份邏輯、在多個相機之間共享流程,或部署由 Auto-Integration Builder 生成的流程。
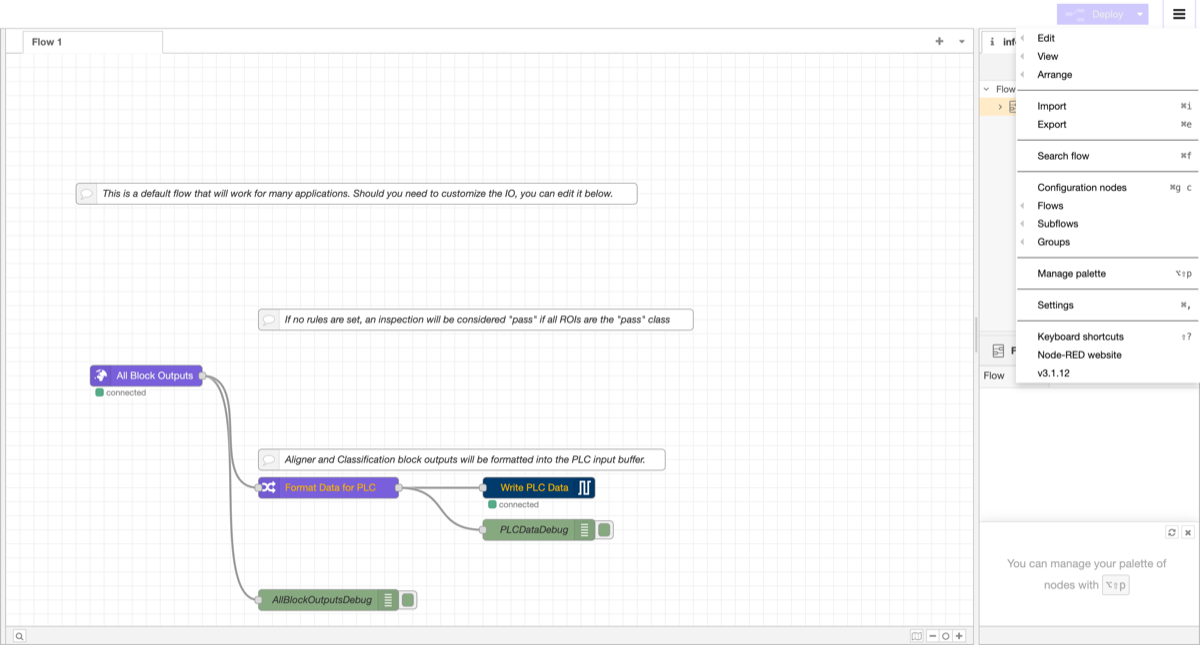
要訪問匯入/匯出功能,請單擊 Node-RED 編輯器右上角的漢堡選單(三條水平線):
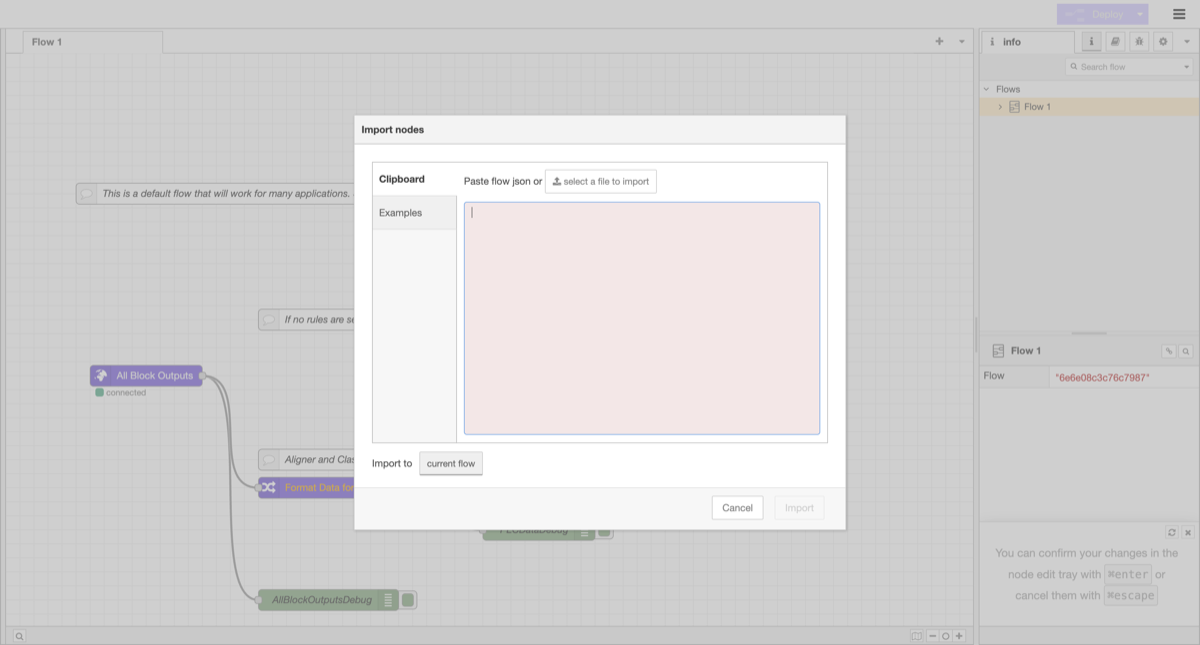
匯入流程: 從選單中選擇匯入。將流程 JSON 貼上到文字區域,或單擊 "select a file to import" 上傳 JSON 檔案。選擇匯入到當前流程還是新流程,然後單擊匯入。
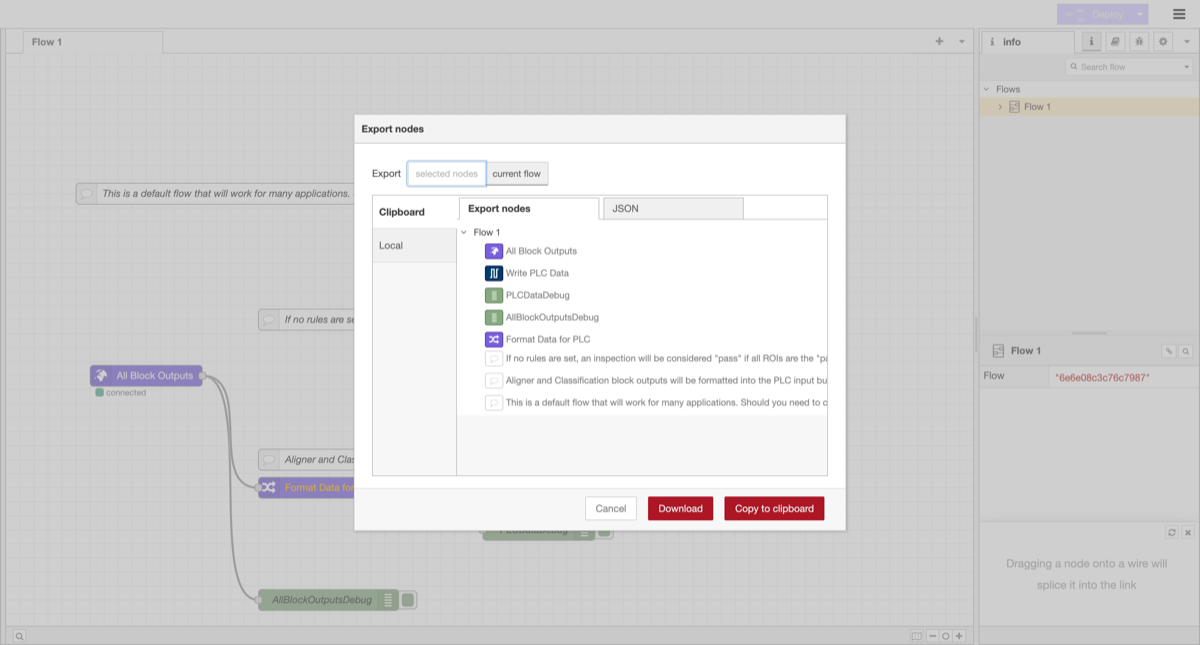
匯出流程: 從選單中選擇匯出。選擇要匯出的節點(選定節點或當前流程),然後單擊下載儲存為檔案,或複製到剪貼簿以便貼上到其他位置。
使用 Auto-Integration Builder 即刻構建流程
無需從零學習 Node-RED。位於 tools.overview.ai 的 OV Auto-Integration Builder 可根據簡單的英文描述生成可投入生產的 Node-RED 流程。
工作原理:
- 開啟 tools.overview.ai 並選擇 Auto-Integration Builder
- 用簡單的英文描述您的需求。例如:"Send an email when 3 failures happen in a row" 或 "Save fail images to an FTP server with the part serial number"
- AI 使用 50 多種可用節點型別生成完整的 Node-RED 流程
- 檢查該流程,一鍵將其部署到您的相機
支援:
- 通訊協議: MQTT、Modbus TCP、OPC-UA、HTTP/HTTPS、RS232、RS485
- 資料路由: FTP、資料庫、MES 系統、雲端儲存
- 邏輯: 時間序列分析、條件分支、聚合
- 通知: 電子郵件、Microsoft Teams、Slack、webhooks
- 硬體 I/O: 訊號塔燈、剔除門、傳送帶、PLC
您還可以使用 Modify Mode:貼上現有流程並描述您希望進行的修改。Builder 會在保留現有邏輯的同時更新流程。
即使您從未使用過 Node-RED,Auto-Integration Builder 也能讓您在幾分鐘內完成複雜的整合設定。描述您的需求、檢查生成的流程、然後部署即可。
輸出目標
您已確定了透過/失敗的計算方式。現在需要決定結果傳送至何處。共有三個目標,每個目標都有不同的要求:
| 目標 | 所需邏輯模式 | 適用場景 |
|---|---|---|
| 獨立模式(僅相機 UI / 儲存的影象) | Basic 或 Advanced | 操作員從螢幕上讀取透過/失敗結果;無其他系統需要該結果 |
| PLC(EtherNet/IP、PROFINET) | Basic 或 Advanced | PLC 驅動產線且需要檢測結果 |
| 數字輸出(DO0 / DO1) | Basic (v2026.5+) 或 Advanced | 訊號塔燈、剔除門、繼電器或 I/O 聯結器上的任何物理裝置 |
您可以同時使用多個目標,例如,透過 EtherNet/IP 將透過/失敗結果傳送給 PLC(PLC 讀取的資料塊),同時透過 DO0 驅動訊號塔燈。
獨立執行
如果相機即為整個系統,沒有 PLC,除了電源和到膝上型電腦或 HMI 的乙太網連線外沒有其他外部接線,那麼除了配置 IO模組外,您無需進行其他操作。透過/失敗結果會顯示在實時預覽螢幕上以及已儲存的捕獲歷史記錄中。基本模式和高階模式均可使用;根據您的邏輯複雜度選擇即可。
您可以在 I/O Live Monitor 頁面上監控數字 I/O 引腳和 EtherNet/IP 連線的實時狀態:
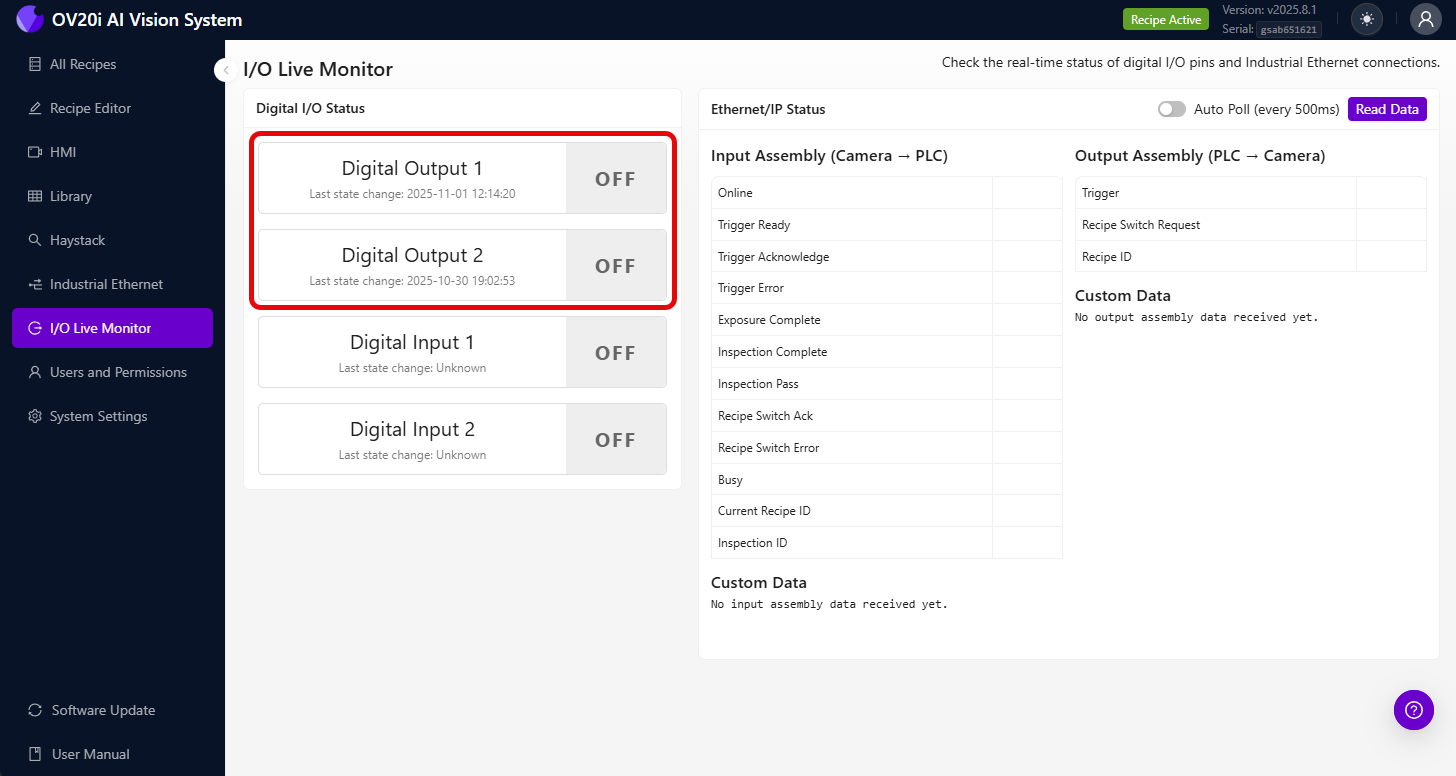
PLC (EtherNet/IP 與 PROFINET)
OV20i 原生支援 EtherNet/IP 和 PROFINET,因此標準的透過/失敗 + 每個 ROI 結果載荷無需任何 Node-RED 即可傳輸到您的 PLC。您匯入我們提供的 EDS 或 GSDML 檔案(連結位於本頁底部),將 PLC 指向相機的 IP,相機的標準元件/模組就會直接公開結果欄位。
那麼何時需要使用 Node-RED 進行 PLC 整合?當標準載荷不夠用時,例如,您希望傳送額外的 ROI 欄位、自定義缺陷程式碼、計算值或來自條碼讀取器的序列號。在這種情況下:
- EtherNet/IP:使用從 Node-RED 流中寫入的自定義欄位來擴充套件元件
- PROFINET:在 TIA Portal 裝置配置中新增
User Data - 64 bytes和User Results - 64 bytes自定義模組,並從 Node-RED 流中寫入它們
有關接線、檔案和分步設定,請參閱 Connect to PLC (EtherNet/IP & PROFINET)。
數字輸出 (DO0 / DO1)
OV20i 在 M12 聯結器上有兩個數字輸出,DO0(引腳 10,紫色)和 DO1(引腳 11,橙色),均為 NPN 漏型(輸出將線路拉至地),每路額定 100 mA。可用於驅動訊號燈、剔除門、繼電器、指示燈 LED,或任何由 24V 漏型訊號觸發的裝置。
在 v2026.5 之前的版本中,基本模式下沒有原生的"將透過傳送至 DO0"切換選項,因此您需要使用高階模式的 Node-RED 流,並將數字輸出節點連線到檢測結果。在 v2026.5 及更新版本中,您可以直接從基本 IO 模組對映 DO0 / DO1(鎖存/脈衝、常開/常閉),無需 Node-RED。
最簡單的"透過亮綠燈、失敗亮紅燈"流程使用兩個連線到透過/失敗分支的數字輸出節點。有關分步接線 + Node-RED 設定,請參閱 Set Digital Output Logic。
一旦引腳已接線且流程到位,您可以編碼比單純透過/失敗更豐富的訊號,不同的缺陷類別可以對映到不同的引腳組合,或者您可以將引腳脈衝 N 毫秒以驅動一次性剔除電磁閥。
觸發模式
配置捕獲的發生方式。兩個介面版本中的五種觸發模式相同:
| 觸發方式 | 描述 | 最適用於 |
|---|---|---|
| 手動 | 在相機 UI 上按下按鈕 | 測試和設定 |
| 硬體(數字輸入) | 來自感測器的電訊號 | 帶接近感測器的自動化生產線 |
| PLC | 來自您工業控制器的命令 | 完全自動化且時序精確 |
| 對齊器 | 檢測到部件對齊時自動觸發 | 部件到達時間不可預測的場景 |
| 間隔 | 按設定的時間間隔捕獲 | 連續監控 |
I/O 聯結器上的錯誤接線可能會損壞相機的輸出電路或連線的裝置。在連線到生產機械之前,請始終使用萬用表驗證接線並進行臺架測試。
相機的數字輸出有最大電流額定值。在連線電磁閥、繼電器或電機等大功率裝置之前,請檢查硬體規格。如果您的負載超出額定輸出電流,請使用中間繼電器或驅動板。
部署
- 啟用程式
- 設定觸發模式
- 執行測試部件,驗證透過/失敗輸出是否符合預期
- 檢查邊界情況,特別是最難分類的部件
- 在第一個小時內進行監控以確保一致性
下載 PLC 整合檔案
如果您正在與 PLC 整合,請下載配置檔案和示例程式碼:
EtherNet/IP (Allen-Bradley)
| 檔案 | 描述 |
|---|---|
| OV20i EDS 檔案 | 用於 Studio 5000 (ControlLogix/CompactLogix) 的電子資料表 |
| 程式切換例程 | 透過 PLC 更換程式的梯形圖邏輯 |
| 相機觸發例程 | 用於觸發檢測和處理結果的梯形圖邏輯 |
PROFINET (Siemens)
| 檔案 | 描述 |
|---|---|
| OV20i GSDML 檔案 | 用於 TIA Portal 的裝置描述檔案 |
在配置連線之前,請將 EDS 或 GSDML 檔案匯入到您的 PLC 程式設計環境中。L5X 例程是即用型梯形圖邏輯,您可以直接匯入到 Studio 5000 中。
輸出檢查清單
在上線之前,請確認:
- 已配置 IO 規則(透過/失敗邏輯符合您的要求)
- 已設定觸發模式(手動、硬體、PLC、對齊器或間隔)
- 已啟用程式
- 已執行測試部件(透過/失敗輸出符合預期)
- 已測試邊界情況(最難分類的部件能正確分類)
您的 AI 檢測現已上線。如需持續最佳化,請參閱改進您的模型。