AI 驅動文件
您想了解什麼?
第二步:對齊
對齊器是相機中最強大(也是最容易被誤解)的部分。一旦你理解了它,一切都會豁然開朗。讓我們簡單地解釋一下。
實際操作演示
在繼續閱讀之前,請先試用模擬器。關閉對齊器,然後移動滑塊來平移和旋轉部件。橙色 ROI 顯示跟蹤部件的感興趣區域 (ROI),當對齊器無法繼續跟蹤時,綠色框會變為紅色。
相機設定
模擬真實環境
移動生產線上的零件。
Legend
對齊的作用(以及為什麼你需要它)
想象一下,你正在檢測電路板上的螺絲。你已經在每個螺絲位置周圍畫了一個小框。但是當下一塊板稍微向左偏移時會發生什麼?或者旋轉了一度呢?你的框現在指向了錯誤的位置。
對齊器解決了這個問題。 它會檢視每張新影象,弄清楚部件移動到了哪裡,並將所有檢測框移動以匹配。就像有一個助手告訴你"板子向左移動了 3 個畫素並旋轉了 0.5 度,所以讓我把你所有的框都移動一下以匹配。"
為什麼這很強大: 當你的檢測框可以隨部件移動時,你可以把它們做得更小。而更小的框需要更少的資料來訓練 AI。這是從良好對齊開始的級聯效益。
為什麼對齊是一切的基礎
對齊器不僅僅是錦上添花。它是決定整個檢測準確性的連鎖反應中的第一張多米諾骨牌。下面是這個流程:
對齊 → 更小的 ROI → 所需訓練資料更少 → 更準確的 AI
每一步都依賴於前一步:
- 良好的對齊 意味著即使部件在傳送帶上發生偏移或旋轉,你的檢測框也能精確跟蹤部件。
- 精確的跟蹤 意味著你可以繪製 更小的檢測框(ROI)。你不需要新增額外的邊距來應對部件移動。
- 更小的 ROI 意味著 AI 看到的是你關心的特徵(螺絲、聯結器、焊點)的緊密裁剪檢視,而不是一片無關的背景。
- 更少的背景噪聲 意味著 AI 學習所需的 訓練影象更少,並且在生產中 錯誤更少。
對齊器不進行任何檢測。它不判斷透過或失敗。它的唯一工作就是 動態移動你的檢測框,使它們每次都能落在正確的位置。檢測框完成實際的檢測工作。這些框內的 AI 完成實際的判斷。但如果框的位置不對,這些都無法正常工作。
可以把它想象成一條鏈條:對齊器 → ROI → 分類器/分割器。如果第一個環節薄弱,下游的一切都會崩潰。
工作原理:把它想象成拼圖
對齊器透過匹配邊緣來工作。這裡有一個簡單的思考方式:
- 你拍一張"參考照片"(模板影象),拍攝一個完美的部件
- 你在照片上指出特定的特徵(角、邊緣、孔洞),這些特徵在每個部件上看起來都一樣
- 每次新部件到達時,相機會在新影象中找到這些相同的特徵
- 它計算差異:"這個部件向左偏移了 5 個畫素,向上偏移了 2 個畫素,傾斜了 1.2 度"
- 它將所有檢測框 按這個偏移量精確移動
這就像玩一個匹配遊戲。相機找到你向它展示的特徵,並將它們用作錨點。
對齊的黃金法則
這一條規則將決定您的對齊是完美執行還是令人沮喪地抖動。原因如下:
這樣理解: 想象一下您試圖判斷牆上的相框是否歪斜。
- 如果您只看一個角,您可能以為它是正的,但實際上它是傾斜的
- 如果您看兩個相對的角(左上角和右下角),您可以立刻判斷它是否歪斜,以及歪斜的精確程度
同樣的原理適用於對齊器。如果零件一側只有一個區域,那麼 0.5 度的微小測量誤差仍然是 0.5 度。但如果零件兩側各有一個區域,相同的誤差經過平均後約為 0.05 度,精度提高了十倍。
關鍵:不應對齊到什麼
這是對齊失敗的首要原因。在您接觸對齊器介面之前,請牢記以下兩條規則。
1. 永遠不要對齊到缺陷
缺陷是不可預測的。劃痕、凹痕或缺失的螺絲在每個零件上看起來可能完全不同,或者根本不存在。
如果您讓攝像頭使用劃痕作為錨點,那麼當一個完好無損、沒有劃痕的零件來到產線上時,對齊將完全失敗。攝像頭將不知道在哪裡放置您的檢測框,整個系統將崩潰。
使用對齊器透過始終存在的特徵(剛性邊緣、加工角、鑽孔)來找到零件。然後使用檢測框來查詢不可預測的缺陷。對齊器找到零件。檢測框找到問題。
2. 永遠不要對齊到可移動部件或標籤
如果您對齊到可以獨立於主體移動的東西,例如鬆散的電線、紙板翻蓋或條形碼貼紙,您將意外地誤導攝像頭將所有檢測框移到錯誤的位置。
示例: 想象您將對齊器錨定到一個條形碼貼紙。在下一個零件上,工人不小心將該貼紙向左放置了半英寸。攝像頭看到貼紙移動,便假設整個零件向左移動了半英寸。它會移動所有檢測框來進行補償。但實際的金屬零件並沒有移動,只是貼紙移動了。現在所有的檢測框都在檢視錯誤的位置,導致全面的誤判失敗。
僅錨定到永久固定在零件剛體上的特徵:加工邊緣、模製角、鑽孔、PCB 輪廓。永遠不要錨定到標籤、貼紙、電線、翻蓋或任何人類可能意外重新定位的物體。
快速總結:應對齊什麼 vs. 應避免什麼
| 對齊到(永久、剛性特徵) | 永遠不要對齊到(可變或可移動) |
|---|---|
| 加工邊緣 | 劃痕、凹痕或缺陷 |
| 鑽孔 | 條形碼貼紙或標籤 |
| PCB 輪廓 | 鬆散的電線或電纜 |
| 模製角或特徵 | 紙板翻蓋或包裝 |
| 衝壓金屬邊緣 | 膠帶、粘合劑或標記 |
| 鑄造或鍛造幾何形狀 | 任何人類可能重新定位的特徵 |
設定對齊器
OV20i Web 介面在 v2026.5 版本中進行了重新設計。請在相機 UI 的右上角檢視您的軟體版本,並選擇匹配的選項卡。您的選擇將應用於此設定流程的每個頁面。
- 舊版本
- v2026.5 及更新版本
以下是對齊器設定介面的樣子。您將看到模板影象,並帶有彩色邊緣高亮顯示,表明對齊器正在使用哪些參考特徵:
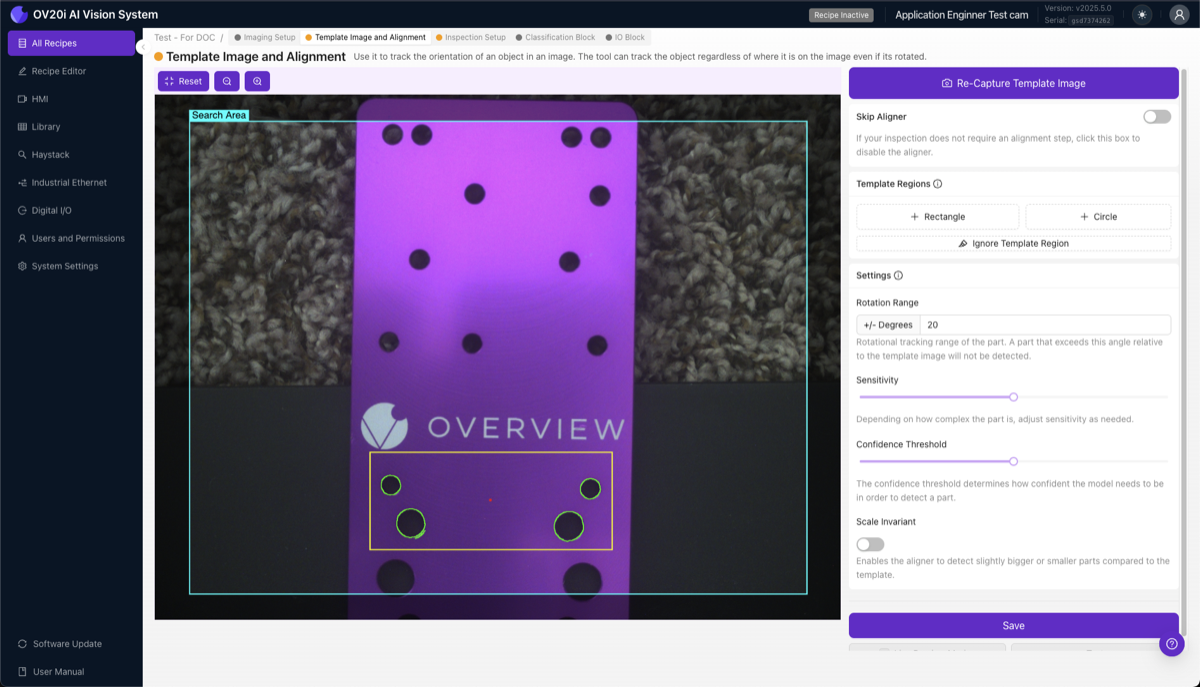
1. 捕獲模板影象。 將良好的、無缺陷的零件放置在相機視野中。這將成為未來每個零件的比較參考。保持其光照充足、邊緣清晰、清潔,並按照生產中將出現的方式定位。點選 Capture Template Image。
2. 新增模板區域。 點選 + Rectangle(或 + Circle)以建立模板區域,並放置 2-3 個。錨定在永不變化的特徵上,例如機加工邊緣、鑽孔、PCB 輪廓、模製特徵和衝壓角。避免有紋理或可變的表面、缺陷出現的區域、反光眩光、微小細節,以及可能移動的標籤或標記。
3. 理解邊緣高亮。 當您放置一個區域時,會看到彩色高亮:
- 綠色高亮 = 檢測到強而可用的邊緣。這是您想要的。
- 紅色高亮 = 邊緣不足。將該區域移到具有更清晰邊緣的特徵上。
- 紅點 = 對齊參考點(所有感興趣區域 (ROI) 的中心)。
4. 使用 Ignore 工具清理噪聲邊緣。 這一步常被大多數人忽視,但它能帶來巨大的差異。點選 Ignore Template Region,然後塗抹任何您不希望對齊器使用的邊緣:隨機背景紋理、眩光或反射、表面噪聲、來自碎屑或標籤的邊緣,以及任何可能在零件之間發生變化的內容。
5. 調整靈敏度。

靈敏度滑塊控制對齊器在模板區域內檢測邊緣的積極程度。將其設定為能在所有區域中提供堅實綠色高亮的最低值。值過低時區域會保持紅色(特徵不足以可靠匹配);值過高時綠色會擴散到背景紋理上,對齊器可能會鎖定到噪聲和抖動。
如果您需要更多邊緣,請增加靈敏度滑塊。但靈敏度越高,使用 Ignore 工具回頭塗掉新出現的噪聲就越重要。先撒大網,然後仔細挑出好魚。
6. 設定旋轉範圍。
控制對齊器搜尋的旋轉角度範圍:±180° 可在任何旋轉角度找到零件(最適合大多數應用),±5-20° 僅在接近預期方向時匹配,±0° 是精確角度匹配。
如果您設定了像 ±5° 這樣的窄範圍,而進入的零件旋轉了 10°,對齊器將無法匹配,您可以將此失敗作為拒絕訊號。這對於捕獲方向不正確的零件很方便。
7. 設定置信度閾值。

對齊器需要多大的置信度才能確認找到正確的匹配。範圍 0.0 到 1.0,推薦 0.6 到 0.9。值過高可能會錯過有效零件;值過低可能會匹配錯誤的特徵。
8. 啟用尺度不變(如有需要)。 如果您的零件可能比相機近或遠 ±10%(例如傳送帶上的高度變化),請啟用此項。否則,保持關閉以獲得最大速度。
9. 儲存並測試。 這是最重要的一步,因此請勿跳過測試。 點選 Save 訓練並部署對齊器,然後點選 Live Preview Mode 並移動零件:左、右、上、下;在您預期的範圍內旋轉它;將其放在幀的角落;嘗試不同的有效零件。嘗試破壞它。 如果對齊無法可靠跟蹤,請立即修復。如果您繼續進行 ROI 和訓練,之後才發現問題,您將不得不重新做所有事情。這就是瀑布效應。
在程式編輯器中,開啟步驟 2:對齊。它在頂部分為四個子選項卡:About Alignment、Capture & Configure、Live Preview 和 Test。Quick guide 按鈕會執行該頁面的簡短引導教程。
關於對齊
從這裡開始複習。此選項卡顯示"使用與不使用對齊器"的對比圖示,以及快速參考列,涵蓋錨定物件、何時使用對齊器、何時跳過、對齊器的侷限以及應避免的事項。

捕獲與配置
這是主要的設定選項卡,是一個引導式清單,從上到下依次完成。
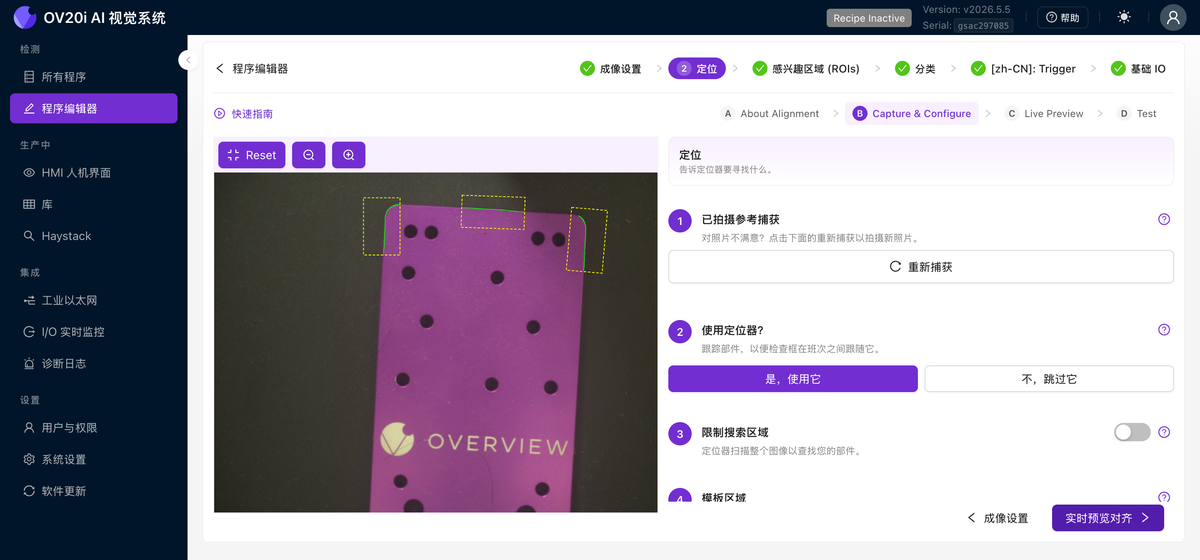
1. 已完成參考捕獲。 選項卡開啟時顯示您捕獲的參考影象。如果不滿意,點選 Re-capture 重新捕獲。點選 What makes a good reference photo? 檢視完整清單:
- 顯示整個零件,佔畫面的約 60% 至 80%。
- 使用均勻光照,避免強烈陰影或眩光。
- 按零件在生產中實際出現的方式放置。
- 捕獲參考影象時保持一切靜止。
- 使用乾淨、純色的背景。
2. 是否使用對齊器?
- Yes, use it 跟蹤零件的位移變化,使檢測框隨之移動。
- No, skip it 適用於零件被精密夾具固定且永不移動的情況。
3. 限制搜尋區域。 預設情況下,對齊器會掃描整張影象以查詢您的零件。開啟此開關可將搜尋限制在影象的某個區域,當零件總是出現在大致相同位置時,這能有效提速。
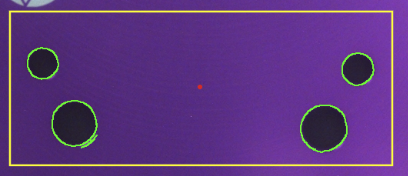
4. 查詢關鍵邊緣和特徵。 點選 + Rectangle,在影象上拖動以繪製模板區域。放置 2 至 3 個區域,錨定在始終存在的特徵上,如徽標、孔和銳利的角,並儘可能分散在零件兩側。點選區域以選中,然後使用出現的刪除按鈕將其移除。
放置區域後,對齊器會高亮顯示其中找到的邊緣,並用紅點標記對齊參考點:
- 綠色高亮表示強健、可用的邊緣。這正是您想要的。
- 紅色高亮表示找到的邊緣不足。請將區域移至邊緣更清晰的特徵。
- 紅點是對齊參考點,即所有區域的中心。
5. 清理多餘邊緣。 使用 Draw mask 塗抹您不希望對齊器使用的邊緣,例如背景紋理、眩光、碎屑或零件之間會變化的內容,並使用 Erase mask 撤銷。調整 Pen size 滑塊進行精細操作,或使用 Clear all masks 重新開始。更乾淨的邊緣會顯著提高可靠匹配的機率。
6. 設定。 微調對齊器的嚴格程度。
Rotation Range 設定對齊器搜尋的旋轉角度範圍,最大可達正負 180°(完整 360° 掃描)。將其縮窄可將方向偏差作為剔除訊號。
Sensitivity 控制找到並匹配的邊緣數量。使用仍能在特徵上獲得穩定綠色的最低設定。
Confidence Threshold 拒絕任何置信度低於閾值的對齊結果。0.6 至 0.9 的值適用於大多數零件。
Scale Invariant 應在零件相對相機距離可能正負變化 10% 時開啟。為獲得最高速度,請保持關閉。
如果需要更多邊緣,請提高 Sensitivity。提得越高,回頭使用 Draw mask 遮罩新噪聲就越重要。撒下大網,然後仔細遮罩掉一切非穩定特徵。
設定一個較窄的 Rotation Range,例如正負 5°,那麼旋轉了 10° 到達的零件就無法匹配。您可以將此失敗作為方向不正零件的剔除訊號。
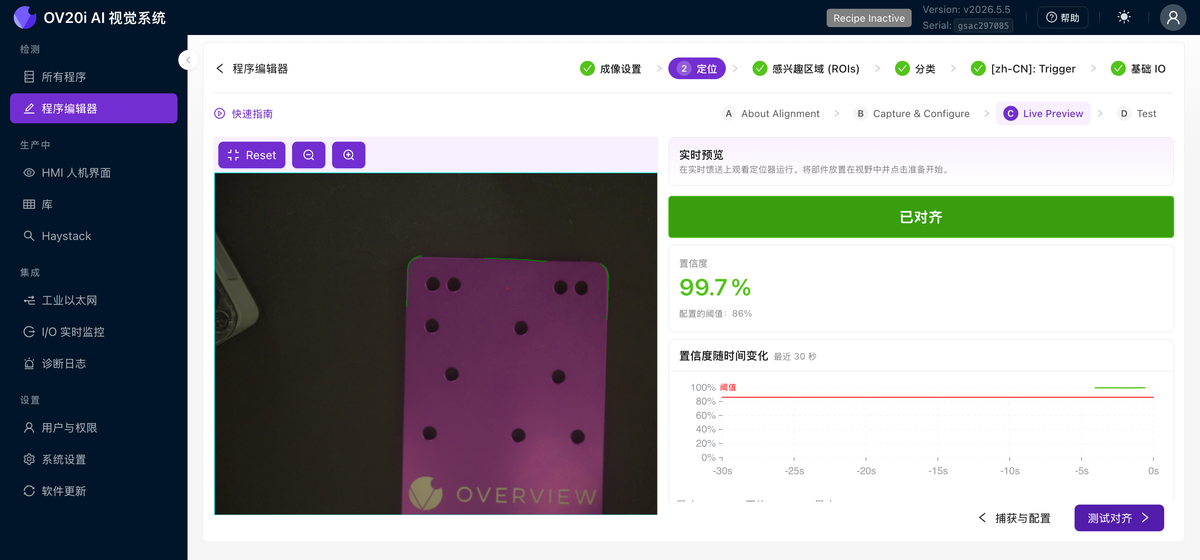
實時預覽
點選 Live Preview Alignment 或 Live Preview 子選項卡,以觀察對齊器在實時畫面上的執行情況。一個大的 ALIGNED 標識顯示當前狀態,旁邊還有相對於已配置閾值的實時 置信度 百分比、置信度隨時間變化的圖表,以及匹配角度、中心 X/Y 和對齊時間的讀數。移動零件、旋轉它、將其推到角落,並嘗試不同的有效零件。確認置信度始終舒適地高於閾值。
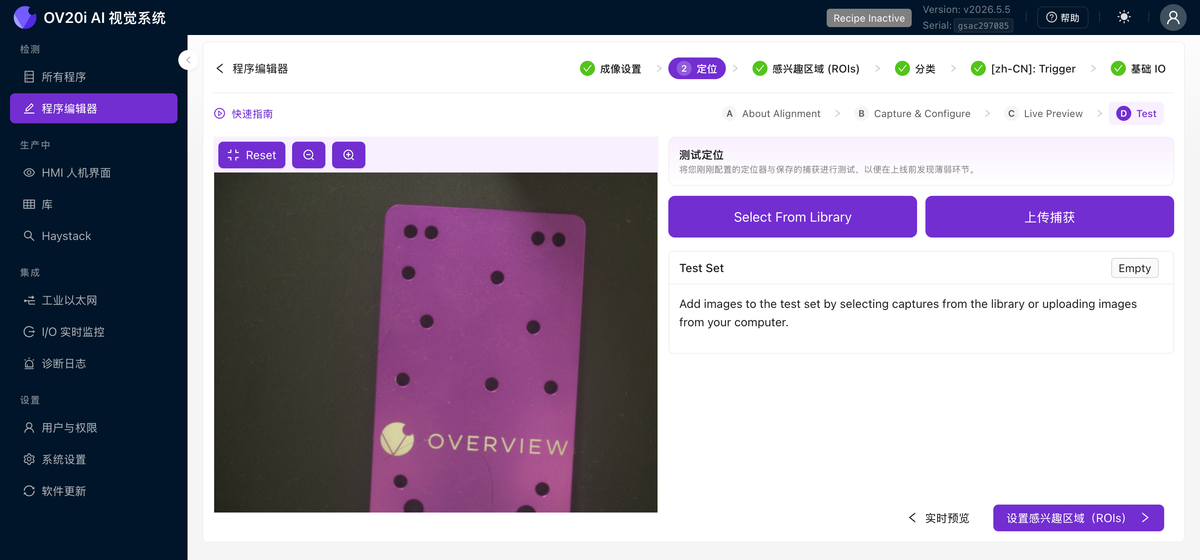
測試
Test 子選項卡使對齊器針對一組固定的已儲存捕獲(而非實時畫面)執行。點選 Select From Library 或 Upload Captures 來構建一個測試集,然後執行它以在產線啟動前發現薄弱環節。
對齊配置會隨您的設定自動儲存,但在繼續下一步之前,請務必在 實時預覽 中確認其能正常跟蹤。如果您跳過測試,在設定完 ROI 並完成訓練後才發現對齊不可靠,那麼您將不得不重做下游的所有工作。這就是瀑布效應。
2D 限制(必須瞭解)
對齊器僅在 2D 中工作:即相機所看到的平面。它可以處理:
- 左右移動
- 上下移動
- 旋轉(在平面上轉動)
- 輕微的尺寸變化(如果啟用了尺度不變)
它不能處理:
- 翹曲或彎曲的零件
- 朝向或遠離相機傾斜的零件
- 任何 3D 變化
如果您的零件存在 3D 變化(一側比另一側更靠近相機),請完全跳過對齊器,改用具有位置不變性訓練的分割器。
何時跳過對齊器
您仍然需要捕獲一張模板影象(系統要求如此),但在以下情況下您可以跳過對齊器(在 v2026.5 中,在 Use the aligner? 下回答 No, skip it;在舊版本中,切換 Skip Aligner):
- 您的零件位於精密夾具中,移動量小於 1-2 個畫素
- 您正在使用保證精確定位的機械定位
- 您正在使用不需要位置跟蹤的分割器
快速參考
| 設定 | 推薦值 | 何時調整... |
|---|---|---|
| 模板區域 | 2-3 個,儘可能遠 | 對齊抖動 → 增加區域並將其分散 |
| 靈敏度 | 能讓您的特徵顯示穩定綠色的最低值 | 邊緣不足(紅色)→ 增加,然後清除噪點 |
| 旋轉範圍 | 大多數應用 ±180° | 零件以已知方向到達 → 縮小範圍 |
| 置信度 | 0.6-0.9 | 錯誤匹配 → 增加。漏掉有效零件 → 降低 |
| 尺度不變 | 除非需要,否則關閉 | 零件距離相機遠近不同 → 啟用 |
對齊故障排除
常見對齊問題及解決方法
| 問題 | 可能原因 | 解決方法 |
|---|---|---|
| ROI 不隨零件移動 | 對齊器已關閉,或沒有模板區域 | 開啟對齊器;新增模板區域 |
| 對齊來回抖動 | 單一區域,或多個區域彼此過近 | 在相對的兩側新增 2-3 個相距較遠的區域 |
| 置信度始終接近 0% | 區域內沒有可用邊緣 | 將區域移至具有強烈、清晰邊緣的特徵上 |
| 匹配到錯誤目標 | 特徵不夠獨特,閾值過低 | 選擇更具辨識度的特徵;提高置信度閾值 |
| 部分零件可用,其他零件失敗 | 區域放置在零件間存在差異的特徵上 | 將區域移至通用特徵(加工邊緣、孔位) |
對齊檢查清單
繼續之前,請確認:
- 模板影象已從一個良好的、無缺陷的零件捕獲
- 2-3 個模板區域已放置在強壯、穩定的特徵上
- 區域在零件上儘可能分散
- 使用清理工具遮蔽了噪聲邊緣
- 靈敏度調整得足夠低以避免噪聲,足夠高以使特徵上呈現穩定的綠色
- 旋轉範圍和置信度閾值已設定
- 已測試實時預覽;對齊在所有位置都能跟蹤零件
對齊效果良好?前往第 3 步:感興趣區域 (ROIs)。