AI 驱动文档
您想了解什么?
第 5 步:设置输出
您的 AI 模型已训练完成。现在需要决定相机如何处理每个通过/失败结果,以及将结果发送到何处。
需要回答两个问题:
- 如何计算通过/失败? 基本模式(规则)或高级模式(Node-RED)。
- 结果发送到何处? 独立运行(仅相机 UI)、发送到 PLC,或发送到物理数字输出。
这两个问题相互独立。请在下方选择您所需的场景,找到对应的模式 + 目的地组合,然后详细阅读相关章节。
What are you trying to do?
Pick your scenario — see exactly which mode and destination you need
The page below covers everything in detail. This picker is a shortcut to the right combination for your line.
Operators read pass/fail from the screen. No PLC, no external wiring beyond power and Ethernet to a laptop or HMI.
What to do
- Configure pass/fail rules in the IO Block (Basic mode).
- Done — results show on Live Preview and saved captures.
OV20i Web 界面在 v2026.5 中进行了重新设计。请在相机 UI 的右上角查看您的软件版本,并选择对应的选项卡。您的选择将贯穿此设置流程的每个页面。
- 较旧版本
- v2026.5 及更新版本
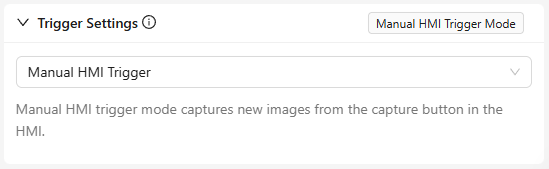
在较旧的界面中,触发设置和 IO模块在此输出步骤中合并显示。您在同一界面上选择触发模式并设置通过/失败逻辑。
触发
从 Trigger Settings 下拉菜单中选择捕获的触发方式(Manual、Hardware、PLC、Aligner 或 Interval)。
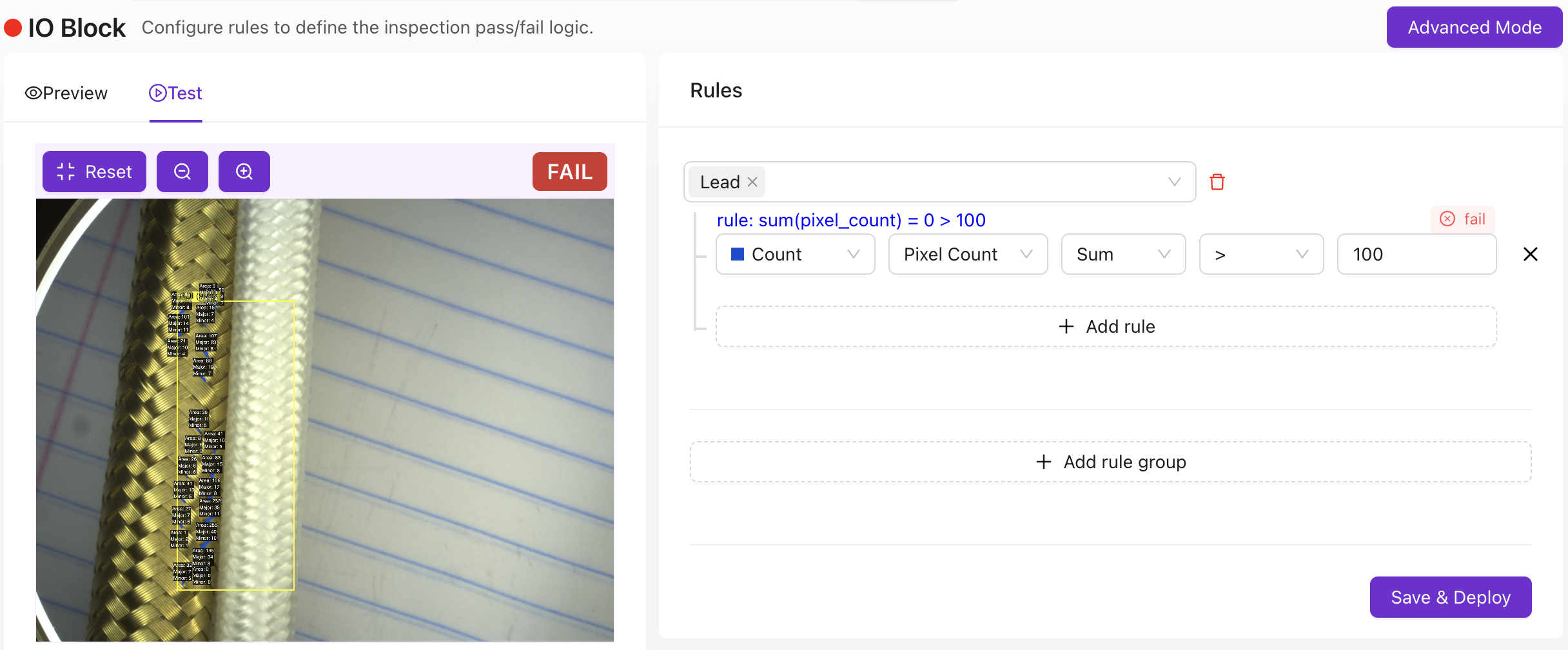
IO模块(基本模式)
为每个 ROI 添加规则(例如,类别必须等于 "pass",或像素数小于 N),并将其组合为整体通过/失败结果。如需超出 per-ROI 规则的功能,请点击 Advanced Mode 打开 Node-RED。
本页其余部分中的概念(逻辑模式、输出目的地、PLC 集成、触发模式和部署)均适用于此界面。
此阶段分为两个步骤:第 5 步:触发和第 6 步:IO模块。
第 5 步:触发
在程序编辑器中,打开第 5 步:触发,从 Trigger source 下拉菜单中选择触发相机的方式。每种模式都有自身的说明,所选模式的相关参数会直接显示在下拉菜单下方。
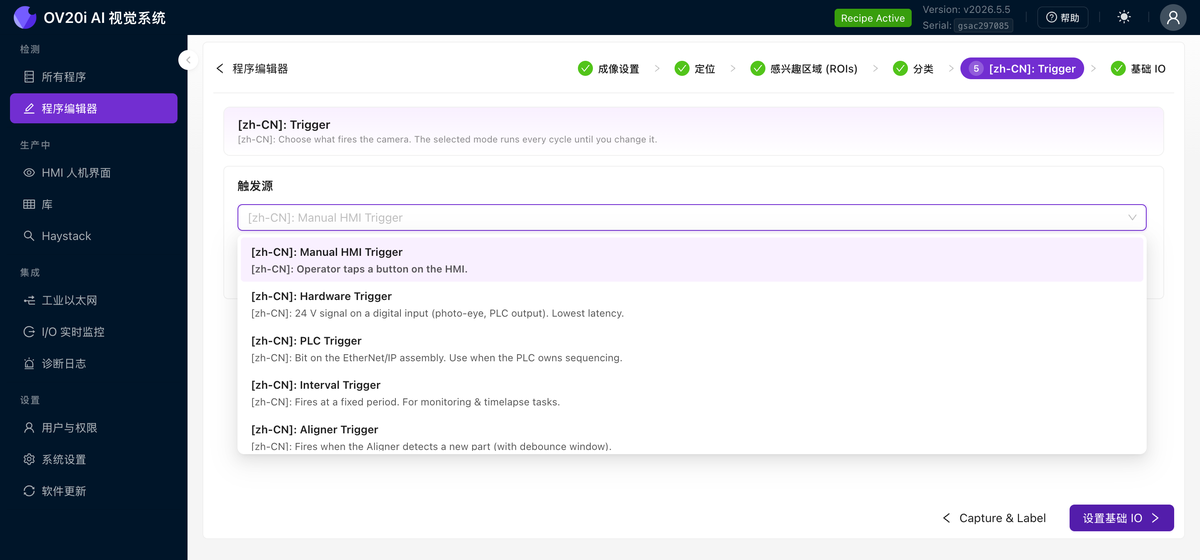
| 触发源 | 触发条件 | 最适合 |
|---|---|---|
| Manual HMI Trigger | 操作员在 HMI 上点击按钮 | 测试和设置(无参数) |
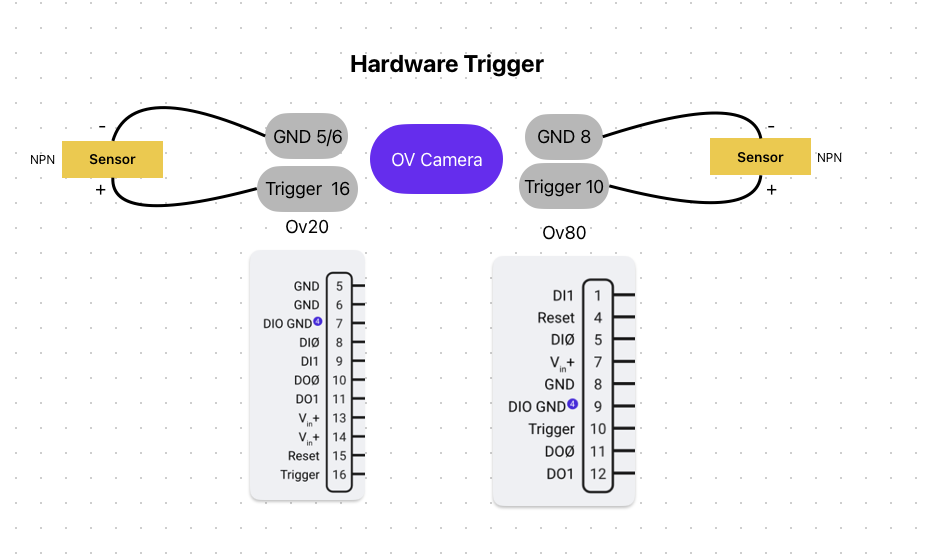
| Hardware Trigger | 24 V 信号到达数字输入(光电传感器、PLC 输出) | 自动化生产线上的最低延迟 |
| PLC Trigger | EtherNet/IP 组装上的某个位发生翻转 | PLC 负责时序控制时 |
| Interval Trigger | 经过固定时间间隔 | 监控和延时拍摄任务 |
| Aligner Trigger | 对齐器检测到新部件(带防抖窗口) | 部件到达时间不可预测 |
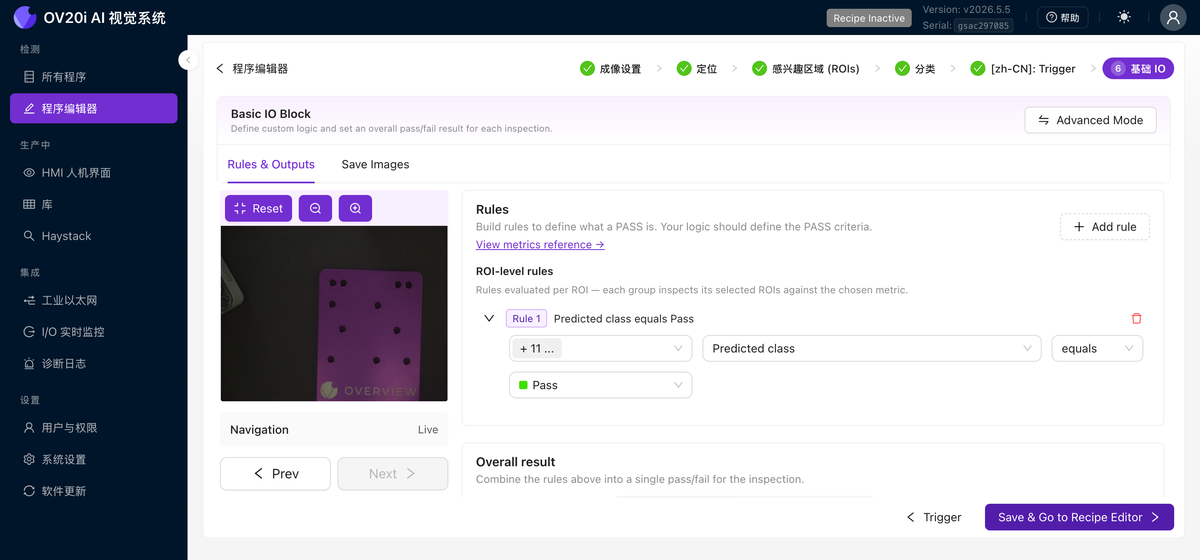
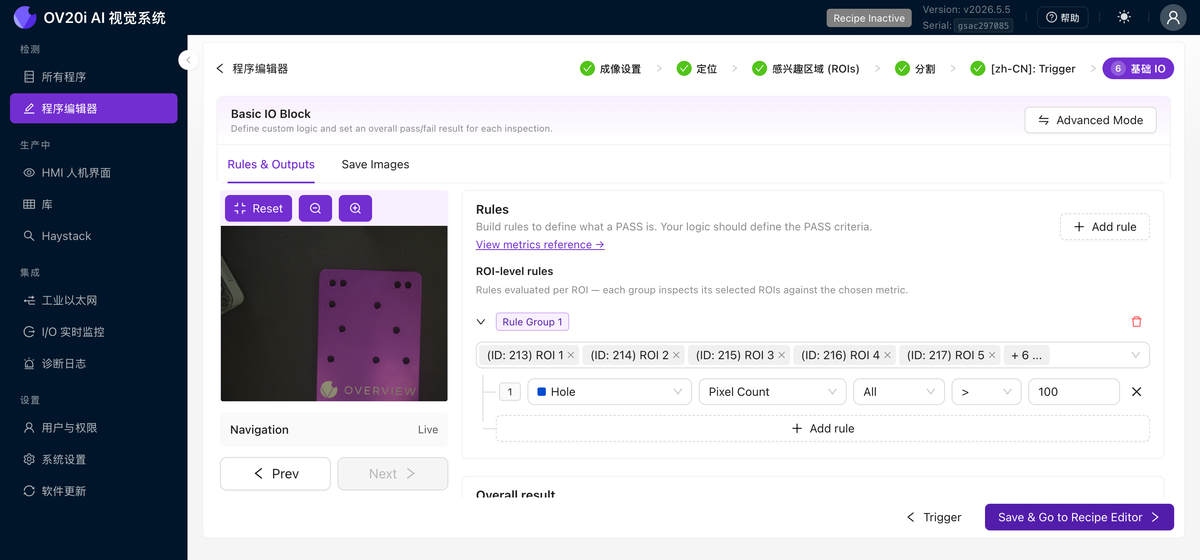
第 6 步:IO模块
IO模块用于为已训练模型分配通过/失败规则和逻辑,然后将该结果输出到相机外部、PLC 或生产线的下一步骤。它默认打开为基本模式。标题栏包含一个保存操作、一个切换到高级模式按钮(该按钮会将整个模块替换为 Node-RED 编辑器),以及两个选项卡:规则与输出和保存图像。
规则的形式取决于您的模型类型,请在下方选择对应的选项卡。(此切换与第 4 步上的切换保持同步。)
- 分类器
- 分割器
规则。 规则定义了什么算作 PASS。点击添加规则以添加一条规则。每条 ROI 级规则从左到右阅读,包含四个部分:
- 规则覆盖哪些 ROI。 打开选择器选择一个检测类型,它会一次选中其所有 ROI(例如显示为 "+ 11 ..."),或深入选择特定的 ROI。
- 指标。 Predicted class 或 Confidence。
- 运算符。 对于类别:equals、not equals、contains 或 doesn't contain。对于置信度:与阈值进行数值比较。
- 值。 例如,
Predicted classequalsPass。
对于分割器,没有单一的 per-ROI 类别可供测试,因此规则改为对模型生成的缺陷掩码设置阈值。规则按规则组进行组织(每个组共同评估一组 ROI),添加规则会构建一个从左到右阅读的五部分规则:
- 类别。 规则关注的分割类别,例如 Hole。
- 指标。 该类别 blob 的几何测量。该下拉菜单(也位于查看指标参考下方)涵盖 Pixel Count、Perimeter、Major Axis Length、Minor Axis Length、Center X / Y、Centroid X / Y 和 Angle,每项均有 Global 变体,该变体在完整图像坐标中而非 ROI 内进行测量。
- 聚合。 该指标在所有检测到的 blob 上的组合方式:Any、All、None、Highest、Lowest 或 Sum。
- 运算符。 数值比较:大于、小于、等于等。
- 值。 用于比较的阈值。
完整阅读时,类似 Hole / Pixel Count / All / > / 100 的规则表示"如果所有检测到的 Hole blob 都大于 100 像素,则失败。"这就是让分割器能够基于缺陷的大小、形状、数量或位置而不仅仅是其存在与否来判定部件失败的方式。
测试与参考控件。 规则列表旁边有几个辅助工具:
- 查看指标参考列出了您可以用于构建规则的每个字段。
- 捕获并测试规则抓取一帧并显示您的规则如何针对实时捕获进行评估。
- 上一个 / 下一个逐帧浏览捕获,以便您在部署前对逻辑进行合理性检查。
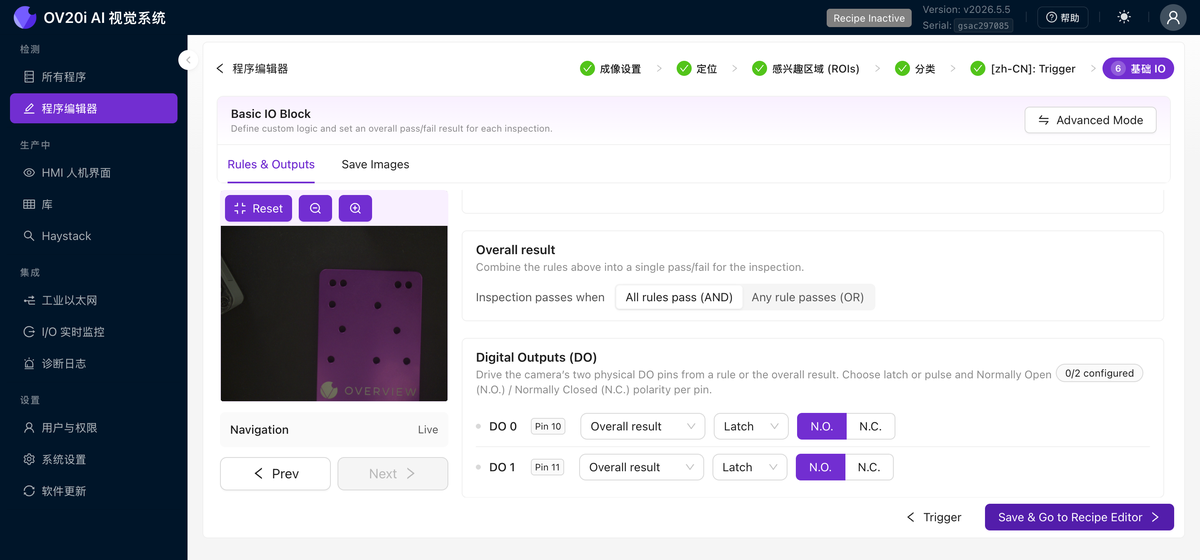
整体结果。 将您的规则组合为相机报告的单一通过/失败结果。选择所有规则通过 (AND) 或任一规则通过 (OR)。这个全局通过/失败结果将传递到 PLC、HMI 和数字输出。
Digital Outputs (DO)。 直接从基本 IO模块驱动相机的两个物理输出引脚,无需 Node-RED。状态行显示两个引脚中已配置的数量。对于每个引脚,DO0 (pin 10) 和 DO1 (pin 11),需设置三项:
- 来源。 即整体结果,或特定规则。
- 行为。 锁存保持状态直到下一个结果;脉冲短暂触发,适合一次性剔除电磁阀。
- 极性。 N.O.(常开)或 N.C.(常闭)。
这就足以接线一个绿灯通过、红灯失败的信号灯,或剔除闸门。
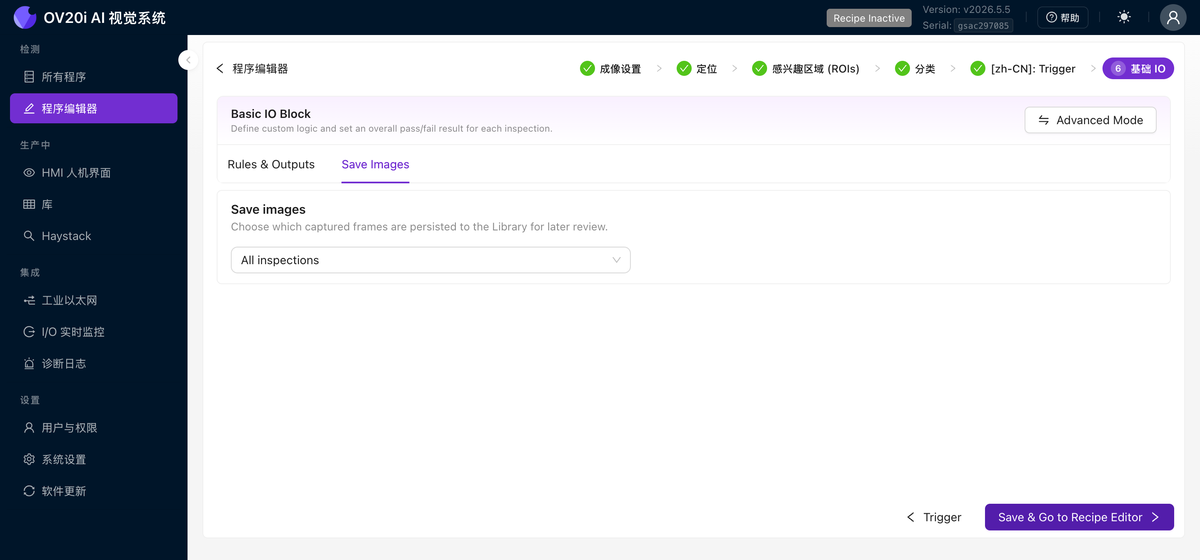
保存图像。 保存图像选项卡用于选择将哪些捕获的帧写入库以供后续查看:所有检测、仅失败(推荐用于重新训练)、仅通过(适用于黄金样品审计)或无。
高级模式。 当您的逻辑超出 per-ROI 规则的范围时,例如时间序列检查、自定义 PLC 数据、路由到 MQTT、MES 或 FTP,或电子邮件和 Teams 警报,请点击切换到高级模式以打开下方介绍的完整 Node-RED 编辑器。
全局通过/失败
每次捕获都会产生一个单一的二元结果:通过或失败。即使您有 50 个感兴趣区域(ROI)执行复杂分析,最终也归结为一个答案:这个部件是好是坏?
这个单一的全局通过/失败结果会被发送到您的 PLC、HMI、信号灯、剔除装置或任何其他系统。摄像头在每次捕获时计算该结果;Basic 模式和 Advanced 模式之间的区别在于您如何表达产生该结果的规则。
选择逻辑模式
Basic 模式:何时使用
当您的通过/失败规则是各 ROI 结果的简单组合时,使用 Basic 模式。例如:
- "所有 ROI 必须 class = 'pass' 才算全局通过"
- "ROI 1 和 ROI 2 必须均为 'present',ROI 3 必须为 'aligned'"
- "主类的缺陷像素数低于 N"
如果您可以用一句话加上 AND / OR / 阈值描述您的规则,Basic 模式可以处理。无需代码,无需流程编辑器。
设置方法: 在 IO模块 中,为每个 ROI 添加规则(例如预测 class 等于 Pass,或置信度/像素计数阈值),然后选择规则如何组合为整体通过/失败(全部必须通过,或任一规则通过)。摄像头会在每次捕获时计算通过/失败。有关您界面中的具体点击路径,请按照上方版本选项卡中的 IO模块 演练操作。
在 v2026.5 及更新版本 中,Basic IO 模块将 DO0 / DO1 直接映射到规则或整体结果(第 6 步中的 Digital Outputs (DO) 部分),无需 Node-RED。在 较旧版本 中,Basic 模式仅生成 PLC 和摄像头 UI 读取的通过/失败信号;要驱动物理引脚,您需要 Advanced 模式。请参阅下方的 数字输出 (DO0 / DO1)。
Advanced 模式:何时使用
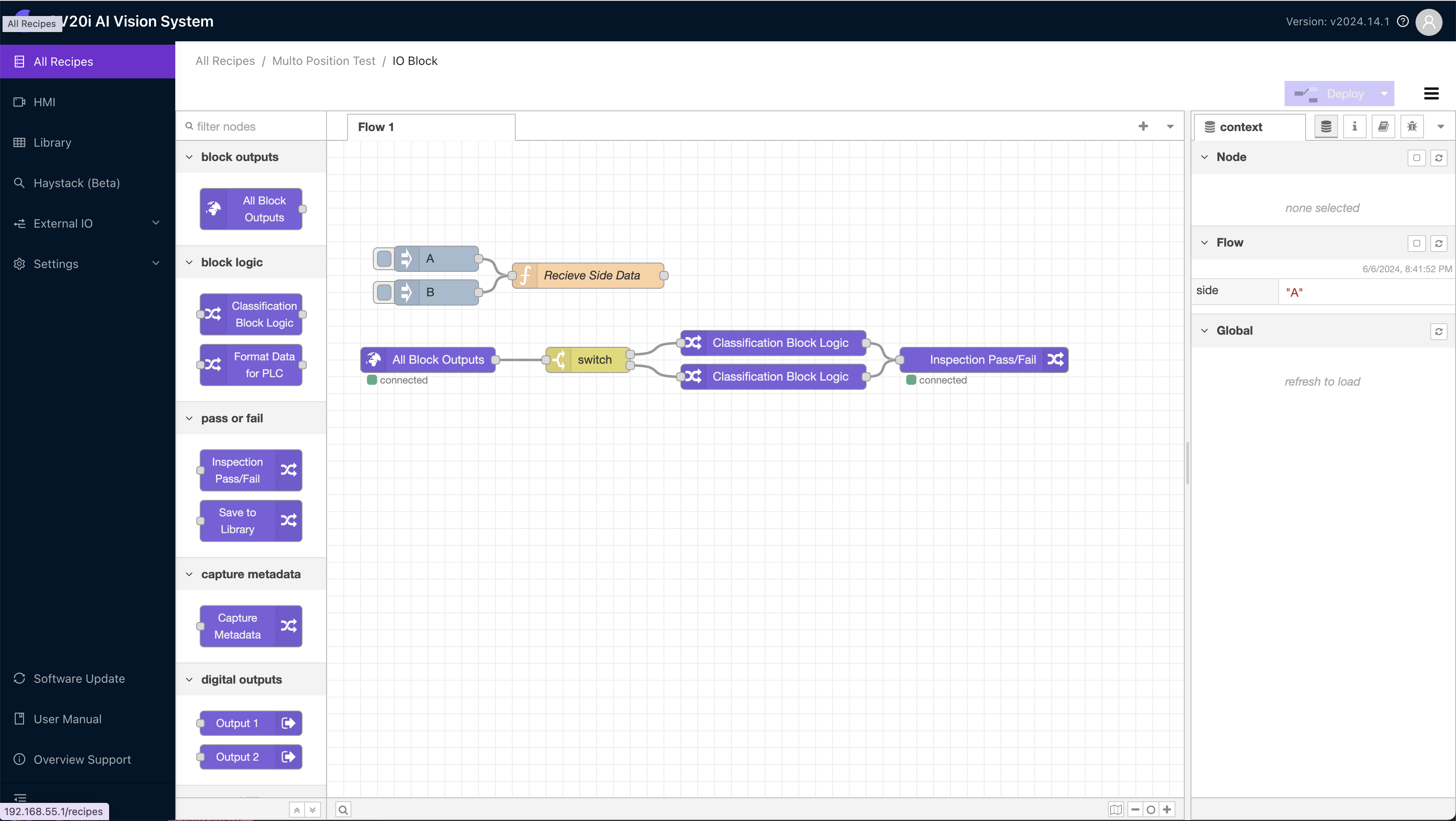
在 IO模块 中点击 Advanced Mode 进入 Node-RED,这是一个可视化编程环境。
在以下情况下使用 Advanced 模式:
- 通过/失败规则需要 超出每个 ROI 阈值 的逻辑,例如"如果总缺陷面积占部件面积的 X%,且至少有 N 个缺陷,且平均置信度高于 80%,则失败"
- 您需要 时序逻辑,"如果最近 10 个部件中有 7 个失败则失败"
- 您需要 驱动物理数字输出(DO0 / DO1)以控制信号灯、剔除装置或继电器
- 您需要 向 PLC 发送超出标准通过/失败 + ROI 载荷的自定义数据(例如 PROFINET
User Data - 64 bytes模块或额外的 EtherNet/IP 装配字段) - 您需要 将数据路由到任何外部位置,如 MQTT、MES、FTP、REST API、电子邮件、Teams、数据库
每次捕获都会启动一个新流程。"All Blocks Output" 节点将捕获的所有元数据公开为 JSON 对象,包括 class、置信度、像素计数、面积、ROI 名称、时间戳,因此任何下游节点都可以基于任何字段进行分支。
您可以构建的内容:
- 组合多个 ROI 字段的自定义通过/失败逻辑
- 信号灯、剔除装置和继电器控制(数字输出)
- 时序分析("我最近 10 个部件中是否有 7 个失败?通知主管")
- 自定义仪表板:Pareto 图、趋势可视化、生产指标
- 数据路由到 FTP、MES 系统、数据库
- 将检测结果与部件序列号关联的条码集成
- 条件图像保存(例如,仅在失败时保存)
- 电子邮件 / Teams / Slack 通知
- 通信协议:RS232、RS485、MQTT、HTTP/HTTPS、OPC-UA
导入和导出流程
您可以将 Node-RED 流程导入和导出为 JSON 格式。这使您能够备份逻辑、在多个相机之间共享流程,或部署由 Auto-Integration Builder 生成的流程。
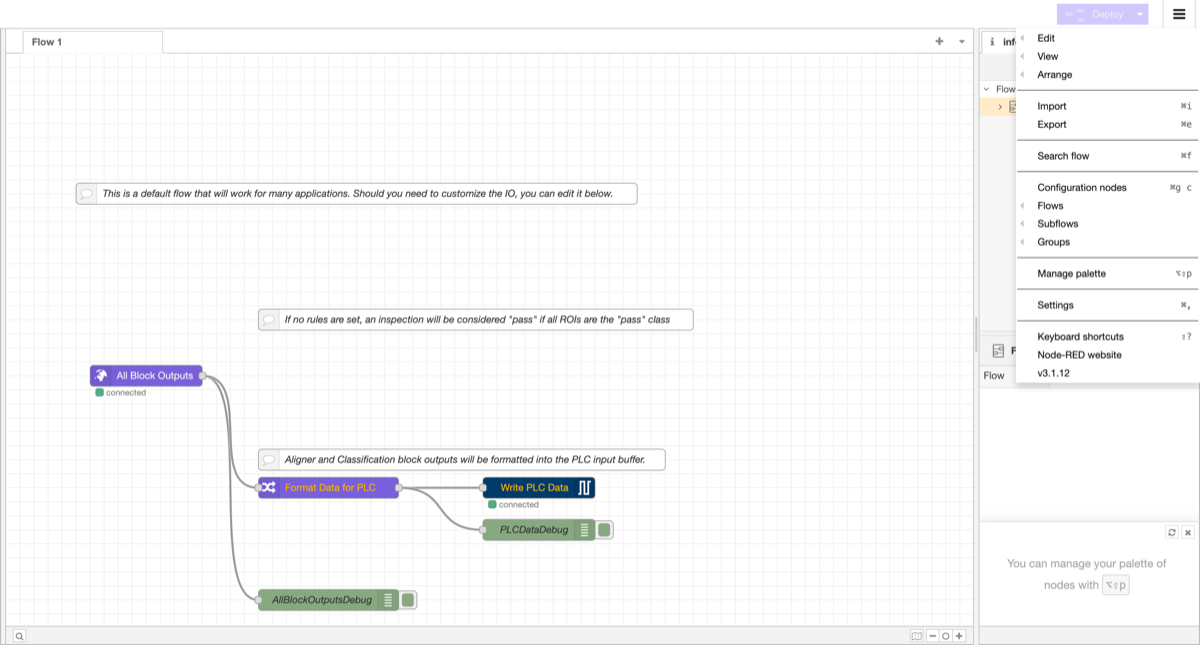
要访问导入/导出功能,请单击 Node-RED 编辑器右上角的汉堡菜单(三条水平线):
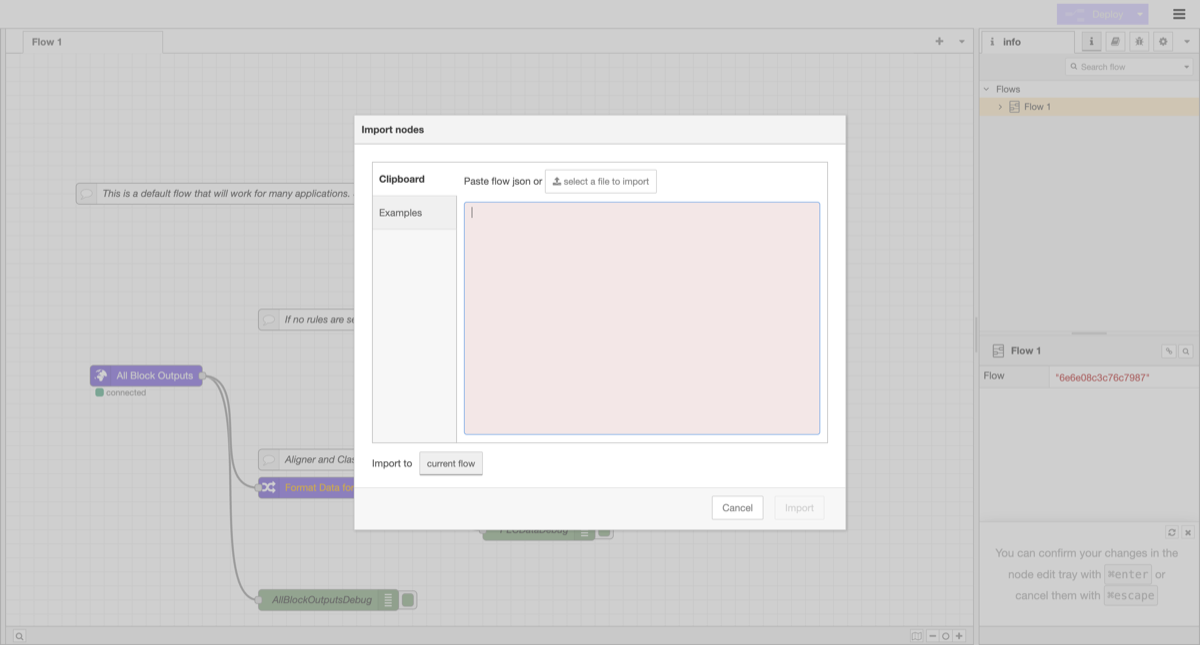
导入流程: 从菜单中选择导入。将流程 JSON 粘贴到文本区域,或单击 "select a file to import" 上传 JSON 文件。选择导入到当前流程还是新流程,然后单击导入。
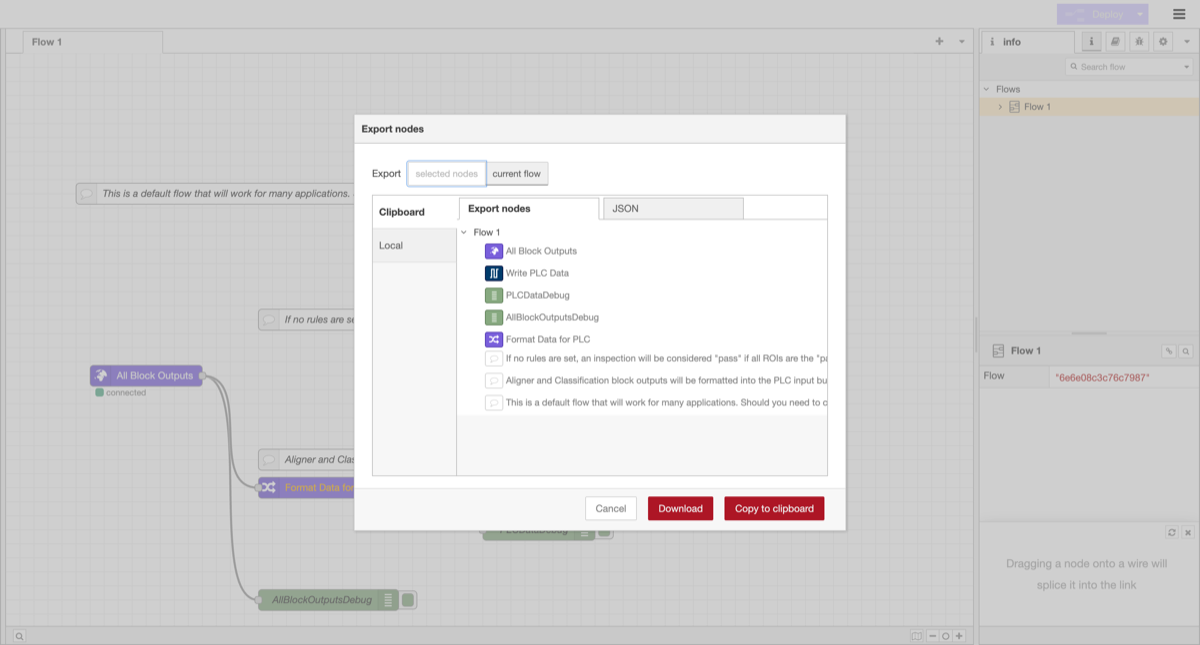
导出流程: 从菜单中选择导出。选择要导出的节点(选定节点或当前流程),然后单击下载保存为文件,或复制到剪贴板以便粘贴到其他位置。
使用 Auto-Integration Builder 即刻构建流程
无需从零学习 Node-RED。位于 tools.overview.ai 的 OV Auto-Integration Builder 可根据简单的英文描述生成可投入生产的 Node-RED 流程。
工作原理:
- 打开 tools.overview.ai 并选择 Auto-Integration Builder
- 用简单的英文描述您的需求。例如:"Send an email when 3 failures happen in a row" 或 "Save fail images to an FTP server with the part serial number"
- AI 使用 50 多种可用节点类型生成完整的 Node-RED 流程
- 检查该流程,一键将其部署到您的相机
支持:
- 通信协议: MQTT、Modbus TCP、OPC-UA、HTTP/HTTPS、RS232、RS485
- 数据路由: FTP、数据库、MES 系统、云存储
- 逻辑: 时间序列分析、条件分支、聚合
- 通知: 电子邮件、Microsoft Teams、Slack、webhooks
- 硬件 I/O: 信号塔灯、剔除门、传送带、PLC
您还可以使用 Modify Mode:粘贴现有流程并描述您希望进行的修改。Builder 会在保留现有逻辑的同时更新流程。
即使您从未使用过 Node-RED,Auto-Integration Builder 也能让您在几分钟内完成复杂的集成设置。描述您的需求、检查生成的流程、然后部署即可。
输出目标
您已确定了通过/失败的计算方式。现在需要决定结果发送至何处。共有三个目标,每个目标都有不同的要求:
| 目标 | 所需逻辑模式 | 适用场景 |
|---|---|---|
| 独立模式(仅相机 UI / 保存的图像) | Basic 或 Advanced | 操作员从屏幕上读取通过/失败结果;无其他系统需要该结果 |
| PLC(EtherNet/IP、PROFINET) | Basic 或 Advanced | PLC 驱动产线且需要检测结果 |
| 数字输出(DO0 / DO1) | Basic (v2026.5+) 或 Advanced | 信号塔灯、剔除门、继电器或 I/O 连接器上的任何物理设备 |
您可以同时使用多个目标,例如,通过 EtherNet/IP 将通过/失败结果发送给 PLC(PLC 读取的数据块),同时通过 DO0 驱动信号塔灯。
独立运行
如果相机即为整个系统,没有 PLC,除了电源和到笔记本电脑或 HMI 的以太网连接外没有其他外部接线,那么除了配置 IO模块外,您无需进行其他操作。通过/失败结果会显示在实时预览屏幕上以及已保存的捕获历史记录中。基本模式和高级模式均可使用;根据您的逻辑复杂度选择即可。
您可以在 I/O Live Monitor 页面上监控数字 I/O 引脚和 EtherNet/IP 连接的实时状态:
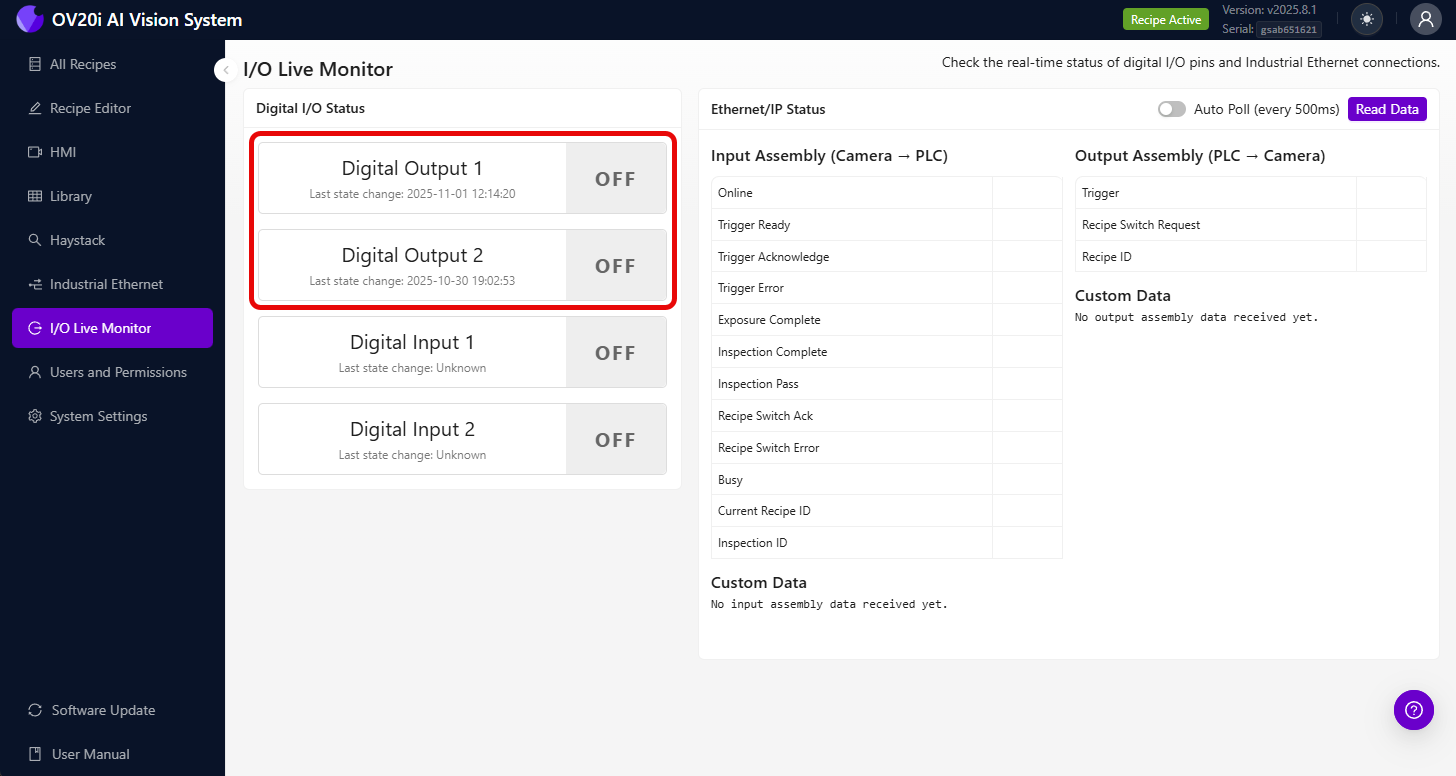
PLC (EtherNet/IP 与 PROFINET)
OV20i 原生支持 EtherNet/IP 和 PROFINET,因此标准的通过/失败 + 每个 ROI 结果载荷无需任何 Node-RED 即可传输到您的 PLC。您导入我们提供的 EDS 或 GSDML 文件(链接位于本页底部),将 PLC 指向相机的 IP,相机的标准组件/模块就会直接公开结果字段。
那么何时需要使用 Node-RED 进行 PLC 集成?当标准载荷不够用时,例如,您希望发送额外的 ROI 字段、自定义缺陷代码、计算值或来自条码读取器的序列号。在这种情况下:
- EtherNet/IP:使用从 Node-RED 流中写入的自定义字段来扩展组件
- PROFINET:在 TIA Portal 设备配置中添加
User Data - 64 bytes和User Results - 64 bytes自定义模块,并从 Node-RED 流中写入它们
有关接线、文件和分步设置,请参阅 Connect to PLC (EtherNet/IP & PROFINET)。
数字输出 (DO0 / DO1)
OV20i 在 M12 连接器上有两个数字输出,DO0(引脚 10,紫色)和 DO1(引脚 11,橙色),均为 NPN 漏型(输出将线路拉至地),每路额定 100 mA。可用于驱动信号灯、剔除门、继电器、指示灯 LED,或任何由 24V 漏型信号触发的设备。
在 v2026.5 之前的版本中,基本模式下没有原生的"将通过发送至 DO0"切换选项,因此您需要使用高级模式的 Node-RED 流,并将数字输出节点连接到检测结果。在 v2026.5 及更新版本中,您可以直接从基本 IO 模块映射 DO0 / DO1(锁存/脉冲、常开/常闭),无需 Node-RED。
最简单的"通过亮绿灯、失败亮红灯"流程使用两个连接到通过/失败分支的数字输出节点。有关分步接线 + Node-RED 设置,请参阅 Set Digital Output Logic。
一旦引脚已接线且流程到位,您可以编码比单纯通过/失败更丰富的信号,不同的缺陷类别可以映射到不同的引脚组合,或者您可以将引脚脉冲 N 毫秒以驱动一次性剔除电磁阀。
触发模式
配置捕获的发生方式。两个界面版本中的五种触发模式相同:
| 触发方式 | 描述 | 最适用于 |
|---|---|---|
| 手动 | 在相机 UI 上按下按钮 | 测试和设置 |
| 硬件(数字输入) | 来自传感器的电信号 | 带接近传感器的自动化生产线 |
| PLC | 来自您工业控制器的命令 | 完全自动化且时序精确 |
| 对齐器 | 检测到部件对齐时自动触发 | 部件到达时间不可预测的场景 |
| 间隔 | 按设定的时间间隔捕获 | 连续监控 |
I/O 连接器上的错误接线可能会损坏相机的输出电路或连接的设备。在连接到生产机械之前,请始终使用万用表验证接线并进行台架测试。
相机的数字输出有最大电流额定值。在连接电磁阀、继电器或电机等大功率设备之前,请检查硬件规格。如果您的负载超出额定输出电流,请使用中间继电器或驱动板。
部署
- 激活程序
- 设置触发模式
- 运行测试部件,验证通过/失败输出是否符合预期
- 检查边界情况,特别是最难分类的部件
- 在第一个小时内进行监控以确保一致性
下载 PLC 集成文件
如果您正在与 PLC 集成,请下载配置文件和示例代码:
EtherNet/IP (Allen-Bradley)
| 文件 | 描述 |
|---|---|
| OV20i EDS 文件 | 用于 Studio 5000 (ControlLogix/CompactLogix) 的电子数据表 |
| 程序切换例程 | 通过 PLC 更换程序的梯形图逻辑 |
| 相机触发例程 | 用于触发检测和处理结果的梯形图逻辑 |
PROFINET (Siemens)
| 文件 | 描述 |
|---|---|
| OV20i GSDML 文件 | 用于 TIA Portal 的设备描述文件 |
在配置连接之前,请将 EDS 或 GSDML 文件导入到您的 PLC 编程环境中。L5X 例程是即用型梯形图逻辑,您可以直接导入到 Studio 5000 中。
输出检查清单
在上线之前,请确认:
- 已配置 IO 规则(通过/失败逻辑符合您的要求)
- 已设置触发模式(手动、硬件、PLC、对齐器或间隔)
- 已激活程序
- 已运行测试部件(通过/失败输出符合预期)
- 已测试边界情况(最难分类的部件能正确分类)
您的 AI 检测现已上线。如需持续优化,请参阅改进您的模型。