AI 驅動文件
您想了解什麼?
使用對齊器工具
對齊器工具是 OV20i 上最強大功能之一。它使用基於邊緣的模板匹配,在部件移動、旋轉或在捕獲之間發生位移時進行跟蹤。當配置正確時,你的感興趣區域(ROI)將動態跟隨部件,因此每次檢查都會擷取正確的區域,無論部件如何呈現。本指南將帶您逐步瞭解對齊器的各個特性,解釋每個設定的作用,並分享能節省大量排錯時間的專家提示。
OV20i 相機設定遵循嚴格的瀑布式流程。對齊器位於步驟 2 — 在 影象設定之後、ROI 配置之前。若在對齊器上游(鏡頭、照明、鏡頭畸變校正、相機位置)進行任何改動,您必須重新捕獲模板影象並重新對齊。跳過此步驟將導致下游出現微妙、難以診斷的故障。
對齊器實際作用
每次相機捕獲影象時,在進行任何 AI 檢查之前,對齊器都會執行。它:
- 掃描新影象中與您定義的模板匹配的邊緣模式
- 計算偏移量 — 部件在 X、Y 方向的平移、旋轉,以及可選的縮放
- 將所有 ROI(感興趣區域)移至檢測到的部件位置
- 報告一個置信度分數,指示對匹配的確定程度
如果置信度分數低於您的閾值,對齊器將報告失敗——您可以選擇跳過檢測或將該捕獲標記為拒絕。
結果:您可以使用更小、更緊湊的 ROI,因為它們不需要為部件移動而保留巨大的安全餘量。更小的 ROI 意味著更高的訊雜比,這也意味著 AI 需要更少的訓練資料,且結果更準確。
對齊器僅支援 2D — 它在與相機正交的平面內工作。它處理平移(X/Y 偏移)、旋轉,以及微小的縮放變化(±10%)。它不處理扭曲的部件、彎曲的部件,或 3D 投影變換。如果部件具有顯著的 3D 變化,請跳過對齊器,改用具有位置不變屬性的 segmenter(分割器)來實現。
先決條件
在配置對齊器之前,請確保已完成:
- 物理影象設定 — 穩定安裝、正確鏡頭、均勻照明
- 鏡頭畸變校正 — 請在捕獲模板之前在影象設定中進行設定
- 部件應儘可能填滿畫面,以最大化畫素解析度
對齊器頁面概覽
在配方編輯器中開啟你的配方,並在左側導航選單中點選 「模板影象與對齊」。
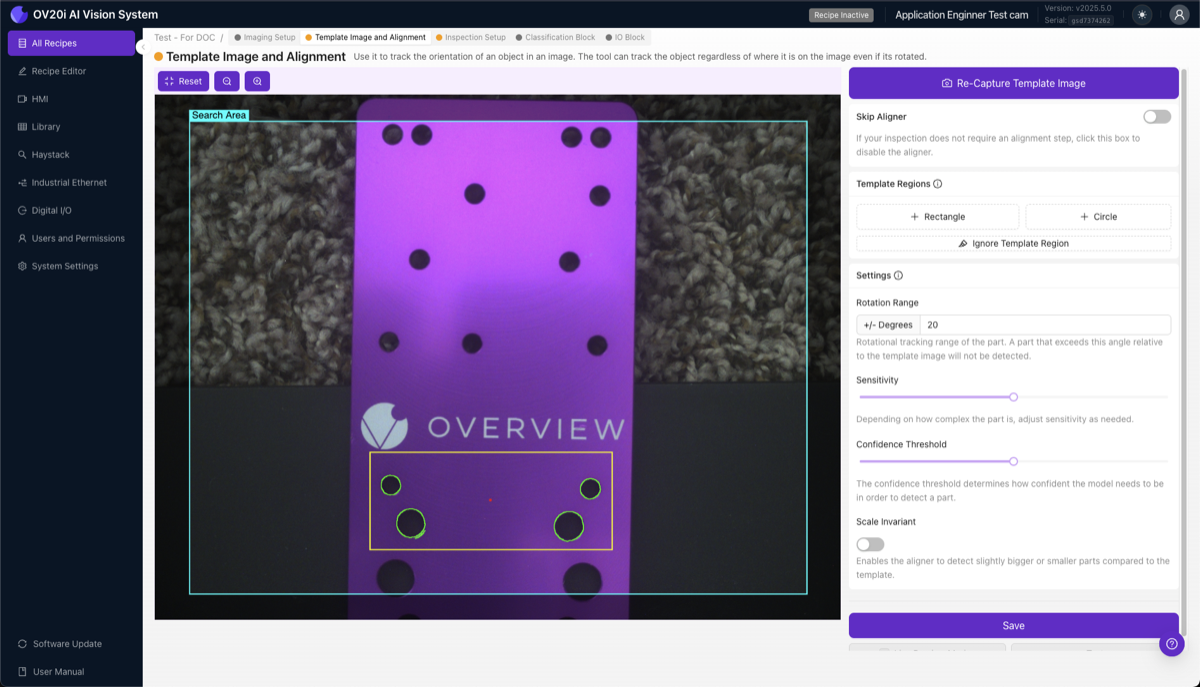
頁面分為兩個主要區域:
- 左側:影象預覽 — 顯示帶有模板區域的模板影象,區域內顯示邊緣高亮(綠色 = 檢測到良好邊緣,紅色 = 邊緣不足)。
- 右側:設定面板 — 包含所有控制元件:Skip Aligner 開關、模板區域工具、旋轉範圍、靈敏度、置信度閾值、尺度不變性,以及 儲存 按鈕。
在頂部將顯示“重新捕獲模板影象”按鈕以重新捕獲模板,以及用於 Snap(快照模式)和 Live(實時預覽模式)的切換按鈕。
第 1 步:捕獲模板影象
模板影象是對齊器用於定位您的工件的參考照片。請在攝像頭視野內放置一個良好示例的工件,然後點選 重新捕獲模板影象。
您的模板部件應當是:
- 光線充足,邊緣清晰、銳利 — 光照均勻且無強烈陰影
- 乾淨,表面無碎屑、油汙或汙染
- 具代表性,應為普通、無缺陷的部件
- 放置,大致在生產過程中部件通常出現的位置
請勿將有缺陷的部件用作模板。對齊器會從此影象匹配邊緣模式,因此模板部件上的任何異常都會成為系統期望在每個部件上看到的模式的一部分。
捕獲後,預覽窗將從實時相機切換到靜態模板影象。您將使用此模板影象來定義區域。
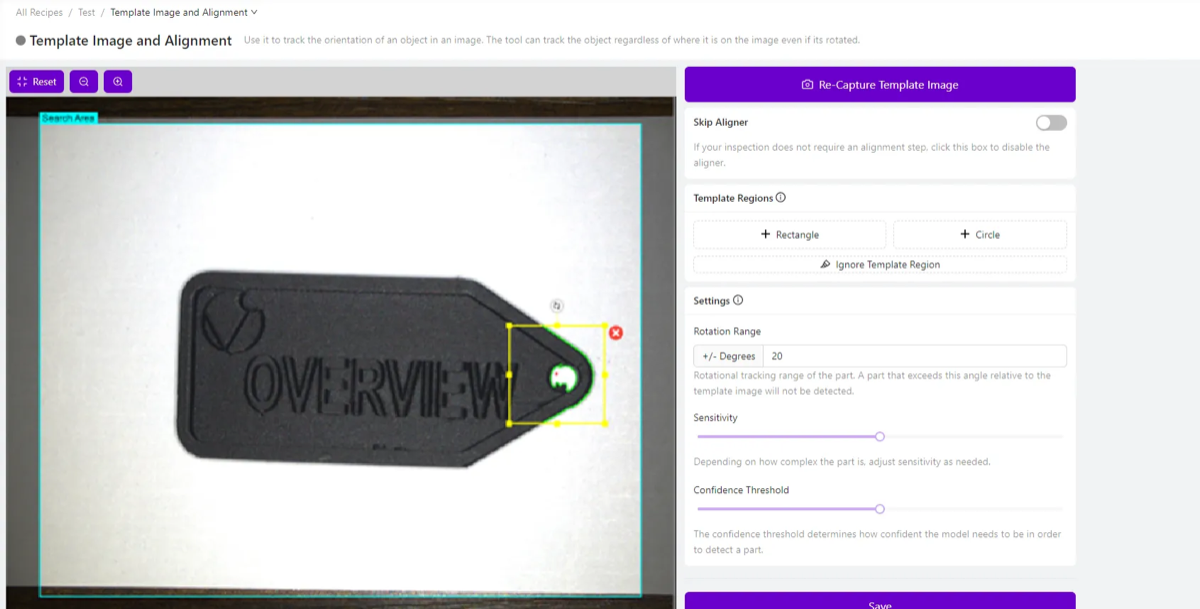
第 2 步:新增模板區域
模板區域告訴對齊器在模板影象上哪裡查詢邊緣模式。您是在具辨識度的特徵周圍繪製矩形框(或圓圈),對齊器將把它們用作錨點。
新增區域
在模板區域面板中點選 + 矩形 或 + 圓形 以建立一個新區域。
放置後,您可以:
- 單擊並拖動 區域以重新定位
- 拖動角部手柄 調整大小
- 單擊區域 以訪問旋轉、調整大小或刪除選項
良好模板區域的要點
選擇邊緣應為:
- 簡單 — 邊界清晰、過渡明確(角、孔、加工邊緣)
- 獨特 — 足夠具辨識性,模式不會與背景特徵隨機匹配
- 一致 — 在經過的每一個部件上都存在且相同
- 穩定 — 不應位於易出現缺陷、汙染或磨損的區域
避免將區域放置在:
- 紋理化或粗糙表面(噪聲過大)
- 反光或光澤區域(在不同照明角度下不一致)
- 可能在缺陷部件上損壞或缺失的特徵
- 被碎屑遮擋的非常小的細節
黃金法則:小而儘可能分散
在部件上儘可能將2–3個小模板區域放置在儘量遠離的位置——例如,一個在左上角,另一個在右下角。這是實現穩定對齊最重要的提示。僅在一側放置一個區域會產生角向抖動(對齊會“搖晃”0.5°或以上)。在對側放置兩個區域可將此誤差平均,抑制抖動達一個數量級(約0.05°)。
您不需要大型區域。一個捕捉尖角的小矩形或幾個乾淨孔洞的區域,遠比包含嘈雜背景的大區域要好。
第 3 步:理解邊緣高亮和紅點
一旦放置模板區域,對齊器會立即分析其中的邊緣。您將看到影象上疊加的彩色高亮:
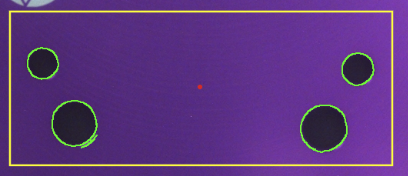
綠色高亮
綠色輪廓線 around features mean the Aligner has detected strong, usable edges in that area. These are the patterns the system will use to find and track your part. The more green you see on consistent, stable features, the better your alignment will be.
紅點
The small red dot you see in the center of the template region (or near the center of the image) is the alignment reference point — also called the anchor point or center of alignment. This is the mathematical center that the Aligner uses as the origin for calculating position and rotation offsets.
When the Aligner finds your part in a new image, it calculates how far the part's detected position has shifted relative to this red dot. All ROI(Region of Interest)positions are then adjusted by the same offset. Think of the red dot as the "pivot point" for the entire alignment transformation.
你不需要手動調整紅點。它基於你的模板區域自動計算。將部件分佈的多個模板區域分散開來,可以為系統提供更穩定、準確的參考點。
紅色高亮(問題指示)
If an entire template region shows red highlights instead of green, it means the Aligner could not find enough usable edges in that area. This is a problem — it means the region is not contributing to alignment. To fix this:
- 提高靈敏度 滑塊(參見步驟 5)
- 移動區域 到具有更清晰、銳利邊緣的區域
- 改善照明 以提高部件特徵的對比度
- 檢查相機對焦 — 模糊的邊緣將無法可靠檢測
第 4 步:使用 Ignore Template Region 工具清除噪聲
Even well-placed regions can pick up unwanted edges — reflections, textures, debris, or background patterns. The Ignore Template Region tool lets you paint over these noisy areas to erase them from the alignment pattern.
- 在 Template Regions 面板中點選 Ignore Template Region
- 將啟用畫筆工具——在你想要刪除的邊緣處進行塗抹
- 塗抹的區域會變成遮罩,永久將這些邊緣從對齊模式中排除
![]()
這點為什麼重要
忽略工具是對齊器配置中最容易被忽視、也是最重要的步驟之一。原因如下:模板中的每一個不需要的邊緣都是對齊器試圖匹配的噪聲。若該噪聲在下一塊部件上不存在(因為它是反射或隨機劃痕),則對齊器的置信度會下降,甚至可能匹配到錯誤的位置。
使用高靈敏度 + 強力清理策略:將靈敏度滑塊調到更高,以檢測更多邊緣;然後毫不留情地使用忽略工具刪除每一個不是乾淨、可重複的部件特徵的邊緣。這樣你就能兼得兩者的優點——捕捉微妙但重要的邊緣,同時過濾掉所有噪聲。
常見需要忽略的項:
- 閃亮的斑點或眩光反射
- 部件周圍可見的背景紋理
- 部件本身的表面紋理(拉絲金屬、成型紋理)
- 由碎屑、油漬或汙染引起的邊緣
- 來自標籤、貼紙或標記的邊緣,在部件之間可能不同
第 5 步:調整靈敏度
靈敏度 滑塊控制邊緣檢測演算法的激程序度。數值越高,檢測到的邊緣越多(包括細微邊緣);數值越低則僅捕獲最強、最明顯的邊緣。

如何找到合適的設定:
- 從預設靈敏度開始
- 如果模板區域顯示紅色高亮(邊緣不足),請增加靈敏度
- 如果紋理和無關特徵上出現過多綠色噪點,請降低靈敏度
- 理想設定是對你關心的特徵仍能獲得穩定綠色高亮的最低靈敏度
靈敏度越高並不總是更好。更多邊緣意味著噪聲的潛在來源也越多。最佳做法是:提高靈敏度以捕捉所需邊緣,然後使用忽略工具移除不需要的部分。這樣可以獲得乾淨、可靠的模式。
第 6 步:設定旋轉範圍
Rotation Range 定義對齊器在搜尋部件時容忍的旋轉變化量。
- ±180° — 在任意旋轉角度下都能找到部件(最大靈活性)。適用於傳送帶或機器人取放系統中方向不可預測的部件。
- ±5–20° — 對於大致定位但可能存在微小旋轉變化的部件。常見於帶有一定間隙的夾具設定。
- ±0° — 僅匹配與模板完全相同角度的部件。處理速度最快。
將旋轉範圍用作質量門控。 如果將範圍設為 ±10°,而部件到達時旋轉了 15°,對齊器將無法定位它——你可以把此失敗作為一個拒絕訊號。這是在 AI 執行之前就能捕捉到錯位部件的強大方式。
一個常見錯誤是在部件實際可以以任意角度到達時將預設的旋轉範圍保持為 ±20°。如果你的部件可以自由旋轉(例如在振動喂料器上,或沒有導軌的傳送帶),請將其設為 ±180°。否則,對齊器將在任何旋轉超過 ±20° 的部件上失敗,你將花費數小時來除錯看起來像隨機對齊失敗的問題。
處理速度取捨: 更寬的旋轉範圍意味著對齊器需要搜尋更多方向,耗時也更長。對於高速檢測,使用覆蓋實際部件變體的最窄範圍。
第 7 步:設定置信度閾值
置信度閾值 是對齊器在接受檢測為有效之前所要求的最低匹配質量。

- 範圍: 0.0 至 1.0(較低數值表示更嚴格的匹配,1.0 表示完全相同的匹配)
- 推薦: 對大多數應用為 0.6 – 0.9
工作原理:
對齊器會計算模板中的邊緣模式與新影象中找到的邊緣之間的相關分數。該分數考慮模式相似度、空間精度和邊緣質量。如果分數超過閾值,對齊將被接受;否則將被標記為失敗。
調優指南:
| 症狀 | 操作 |
|---|---|
| 對齊器對錯誤的物件或背景進行匹配 | 提高 閾值(嘗試 0.85–0.95) |
| 有效部件未被檢測到 | 降低 閾值(嘗試 0.60–0.70) |
| 大多數部件對齊正常,但個別部件失敗 | 檢查失敗部件是否有遮擋特徵,然後進行調整 |
第 8 步:在需要時啟用 Scale Invariant
Scale Invariant 切換允許對齊器檢測呈現略大或略小於模板的零件——處理 ±10% 尺寸變化。這可以補償零件相對於相機的距離略近或略遠的情況。
Enable Scale Invariant when:
- 零件位於可能升高或降低的傳送帶上
- 零件由不保證確切 Z 高度的機器人呈現
- 夾具在垂直軸上有遊隙
- 零件厚度變化,影響在影象中的表觀尺寸
Leave it disabled when:
- 零件與相機的距離保持一致
- 你希望獲得最快的對齊速度(縮放搜尋會增加處理時間)
- 尺寸變化實際上表示存在問題(錯誤的零件)
第 9 步:在 Live Preview 下儲存並測試
配置完模板區域和設定後:
- 在設定面板底部點選 Save。這將訓練並部署 Aligner 模型。
- 切換到 Live Preview Mode(頁面頂部的“Live”按鈕)。
- 預覽窗格將從靜態模板切換到實時相機畫面,並實時應用對齊。
驗證清單
在啟用 Live Preview 時,進行實際對齊的測試:
- 將零件向左、向右、向上、向下移動 — ROI 應該平滑跟隨
- 在你指定的範圍內旋轉零件 — ROI 應該隨之旋轉
- 嘗試該範圍的邊緣 — 在 ±最大旋轉角度時會怎樣?
- 呈現一個不同的(但有效的)零件 — 對齊仍然成立嗎?
- 嘗試打破對齊 — 將零件放在極端位置、部分遮擋特徵、在模板區域附近新增碎屑
在繼續之前,請務必嘗試打破對齊。 如果對齊很脆弱,在生產中它將以不可預測的方式失敗。請花 2–3 分鐘積極嘗試引發故障。如果它經受住了測試,它就準備進入生產。若不能,請現在就修復——不要繼續進行 ROI 配置和 AI 訓練,否則稍後對齊問題浮現時你將不得不重新做一切(瀑布效應)。
提示與技巧
對永不改變的邊緣對齊
最常見的對齊器錯誤是在特徵上放置模板區域,這些特徵在不同零件之間會變化。即使是微小的差異——標籤位置略有不同、螺釘角度不同、焊點有變化——也會降低對齊置信度或引起抖動。
最佳對齊特徵:
- 機加工邊緣、銑削槽、鑽孔
- PCB 板輪廓、安裝孔
- 公差嚴格的模製特徵(肋、凸臺)
- 衝壓件輪廓或鐳射切割邊緣
策略性使用多個區域
兩個放置得當的區域勝於五個放置不佳的區域。理想設定:
- Region 1: 零件的左上角(或頂部)— 清晰的角點或孔
- Region 2: 零件的右下角(或底部)— 不同的顯著特徵
這種三角定位為對齊器提供位置和旋轉資料,且在最大基線距離下,最小化角度誤差。
當對齊器找不到零件時
如果對齊持續失敗:
- 在 Live Preview 中檢查 confidence 值——它接近閾值還是接近零?
- 如果接近零:你的模板區域沒有可用的特徵——重新設計它們
- 如果接近閾值:略降閾值,或使用 Ignore 工具清理嘈雜邊緣
- 如果對某些零件有效、但對其他零件無效:變化的零件很可能在你放置模板區域的位置處存在被遮擋或缺失的特徵
速度最佳化
對於毫秒級時序關鍵的高吞吐應用:
- 使用 2 個區域(不是 4+)且邊緣乾淨整齊
- 設定覆蓋實際變化的最窄旋轉範圍
- 將 Sensitivity 設定為能給出穩定綠色邊緣的最小值
- 如果你的 Z-distance 不變化,禁用 Scale Invariant
- 保持模板區域較小 — 較大區域意味著要處理更多邊緣
上游變更恢復
如果你更改以下任一項,則必須重新配置對齊器:
| 變更項 | 需要重新執行的操作 |
|---|---|
| 鏡頭畸變校正 | 重新採集模板,重新設定所有區域 |
| 相機鏡頭或焦距 | 重新採集模板,重新設定所有區域 |
| 相機安裝位置 | 重新採集模板,可能需要重新設定區域 |
| 照明配置 | 重新採集模板,驗證邊緣仍被檢測到 |
| 影象曝光/增益設定 | 重新採集模板,驗證邊緣仍被檢測到 |
何時跳過對齊器
並非所有應用都需要對齊。請在以下情況禁用對齊器(勾選“Skip Aligner”):
- 部件位於能保證位置在 1–2 畫素範圍內的精密夾具中
- 部件已進行機械定位且無任何間隙
- 需要最大處理速度且位置變化可以忽略
- 你正在使用一個具有定位不變特性的 segmenter 來處理 3D 部件變異
跳過對齊器時,ROIs 將保持在模板影象上的固定位置。系統會完全跳過對齊計算,這更快,但需要部件呈現完全一致。
對齊器設定快速參考
| 設定 | 目的 | 建議範圍 | 調整時機 |
|---|---|---|---|
| 靈敏度 | 邊緣檢測強度 | 能給出綠色邊緣的最低值 | 區域出現紅色高亮時 → 增加 |
| 旋轉範圍 | 最大旋轉容差(±角度) | 與實際部件變化匹配 | 部件以意外角度到達時 |
| 置信度閾值 | 有效對齊所需的最低匹配質量 | 0.6 – 0.9 | 錯誤匹配 → 增加;漏檢部件 → 減少 |
| Scale Invariant | 允許 ±10% 尺寸變化 | 僅在 Z-distance 變化時啟用 | 在不同相機距離下的部件 |
故障排除快速參考
| 問題 | 可能原因 | 解決方法 |
|---|---|---|
| ROIs 完全不移動 | Skip Aligner 已啟用,或不存在模板區域 | 禁用 Skip Aligner;新增模板區域 |
| 置信度始終接近 0% | 模板區域沒有可用的邊緣 | 將區域移動到邊緣清晰、強邊緣的區域 |
| 對齊抖動/擺動 | 單一區域或區域放置過近 | 在部件兩側遠離彼此地新增區域 |
| 匹配到錯誤物件 | 模式不夠唯一,閾值過低 | 新增更多具有顯著特徵的區域;提高閾值 |
| 在部分部件上可用,在其他部件上失敗 | 模板區域位於可變特徵上 | 將區域移動到 ALL Parts 都存在的特徵 |
| 對齊速度慢 | 區域過多、旋轉範圍過寬、Scale Invariant 已開啟 | 減少到 2 個區域、縮窄旋轉範圍、若不需要則禁用 Scale Invariant |
相關文章: